After my Y6-Copter with APM, I also want to see telemetry data of the Phantom 1, which isn’t capable on its own to transmit any data.
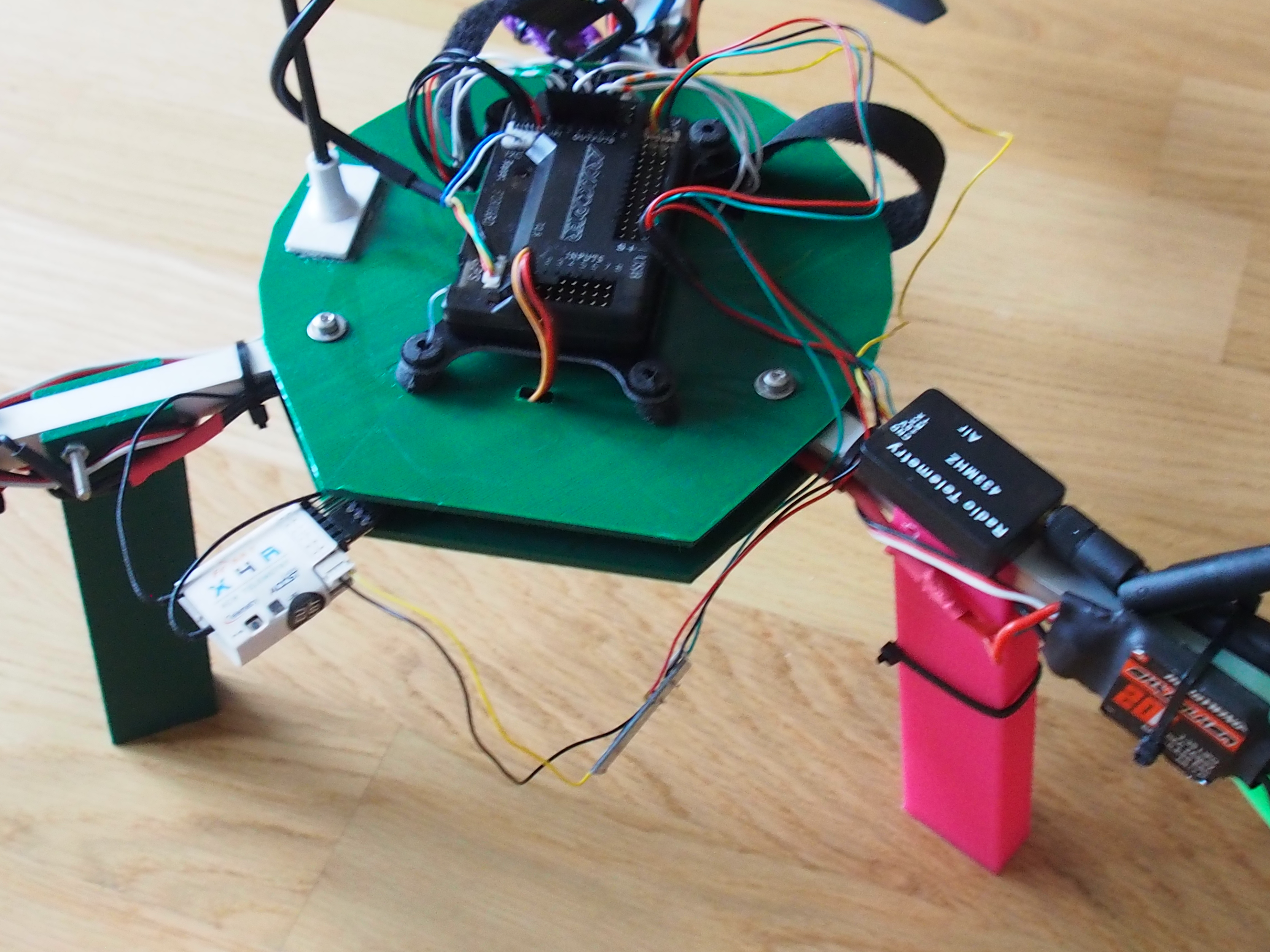
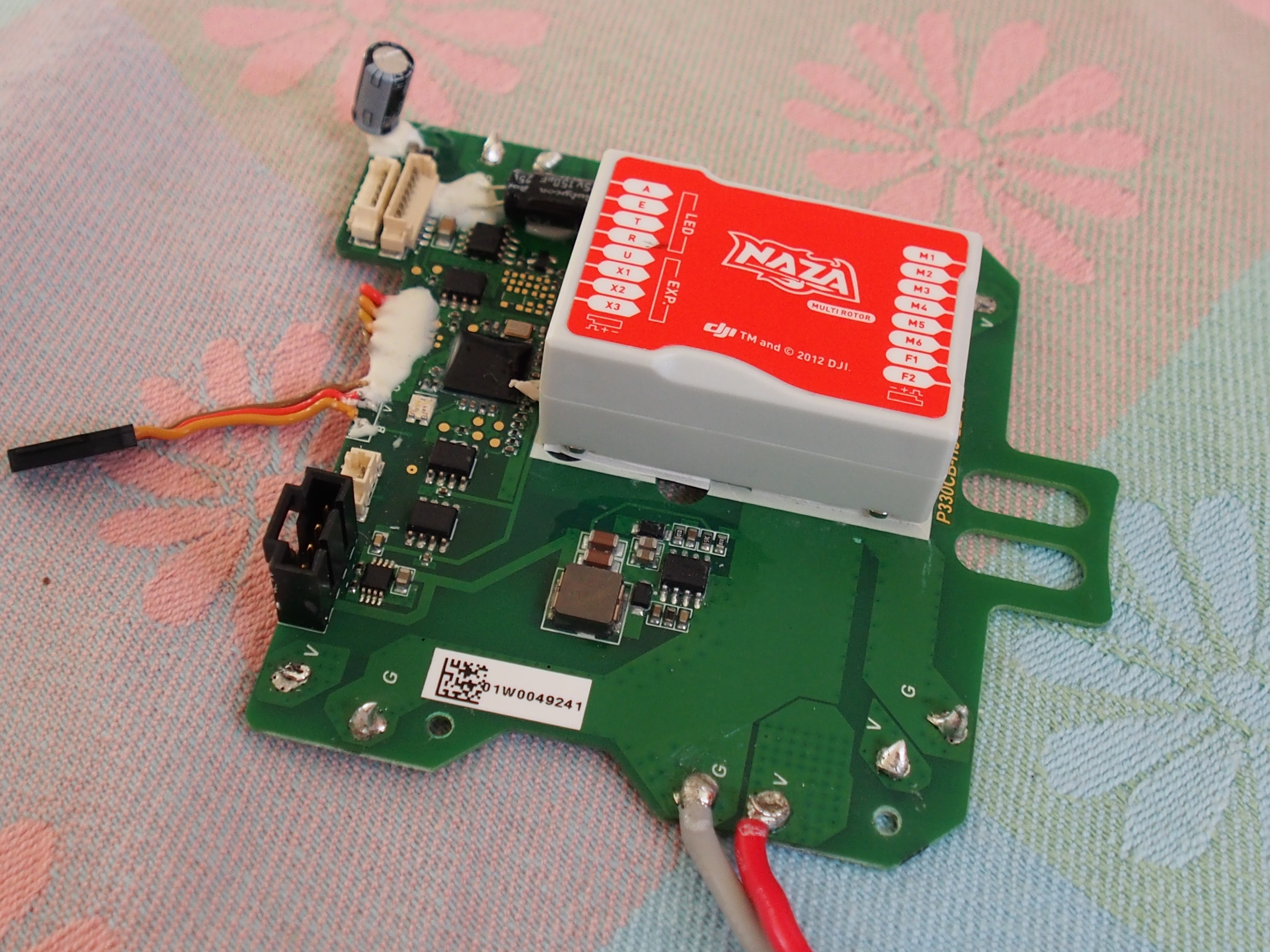
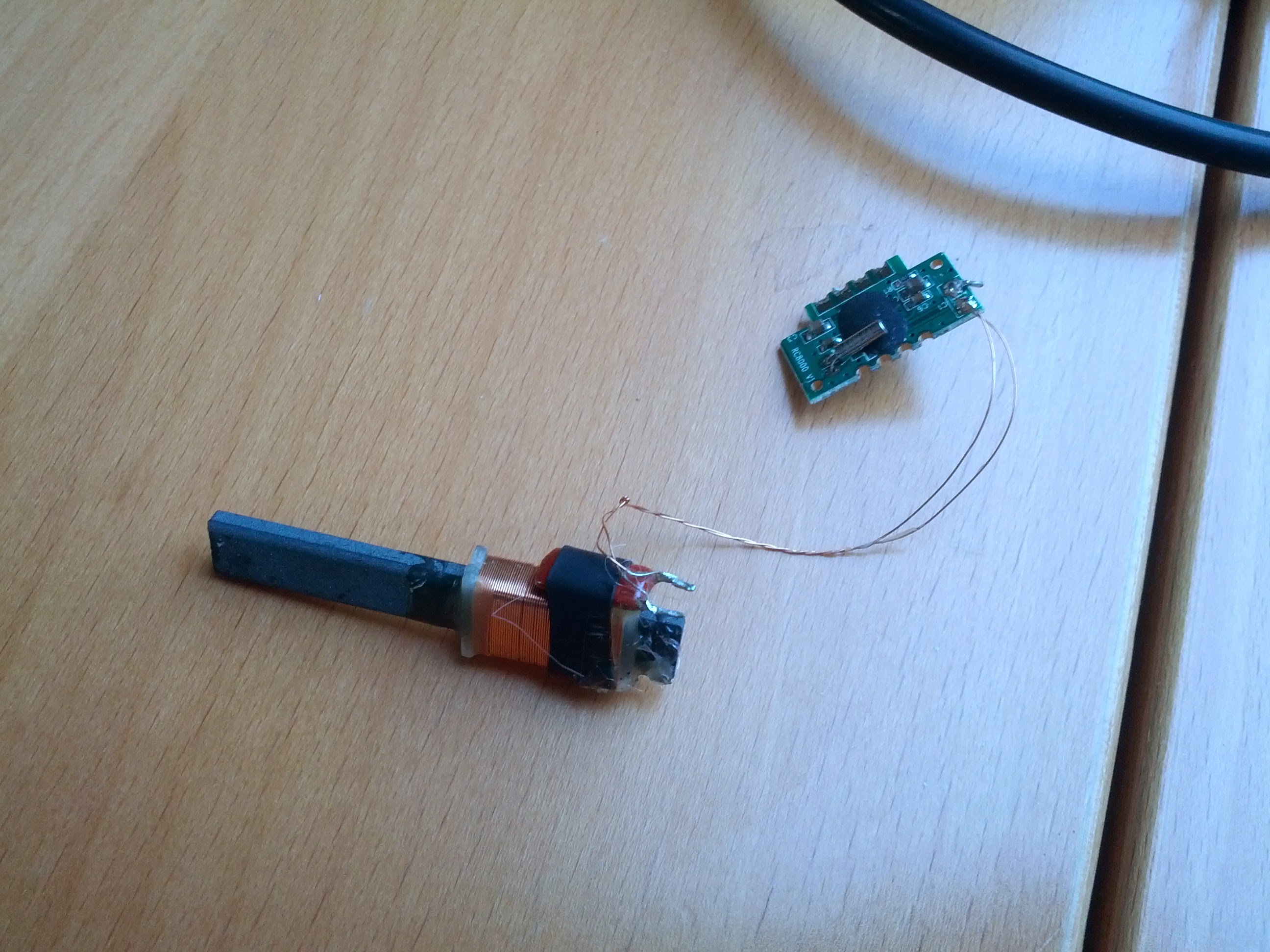
The original PPM receiver (Single antenna) got swapped by a FrSky XRS, which is amazingly small and has PPM, S.Bus and S.Port.
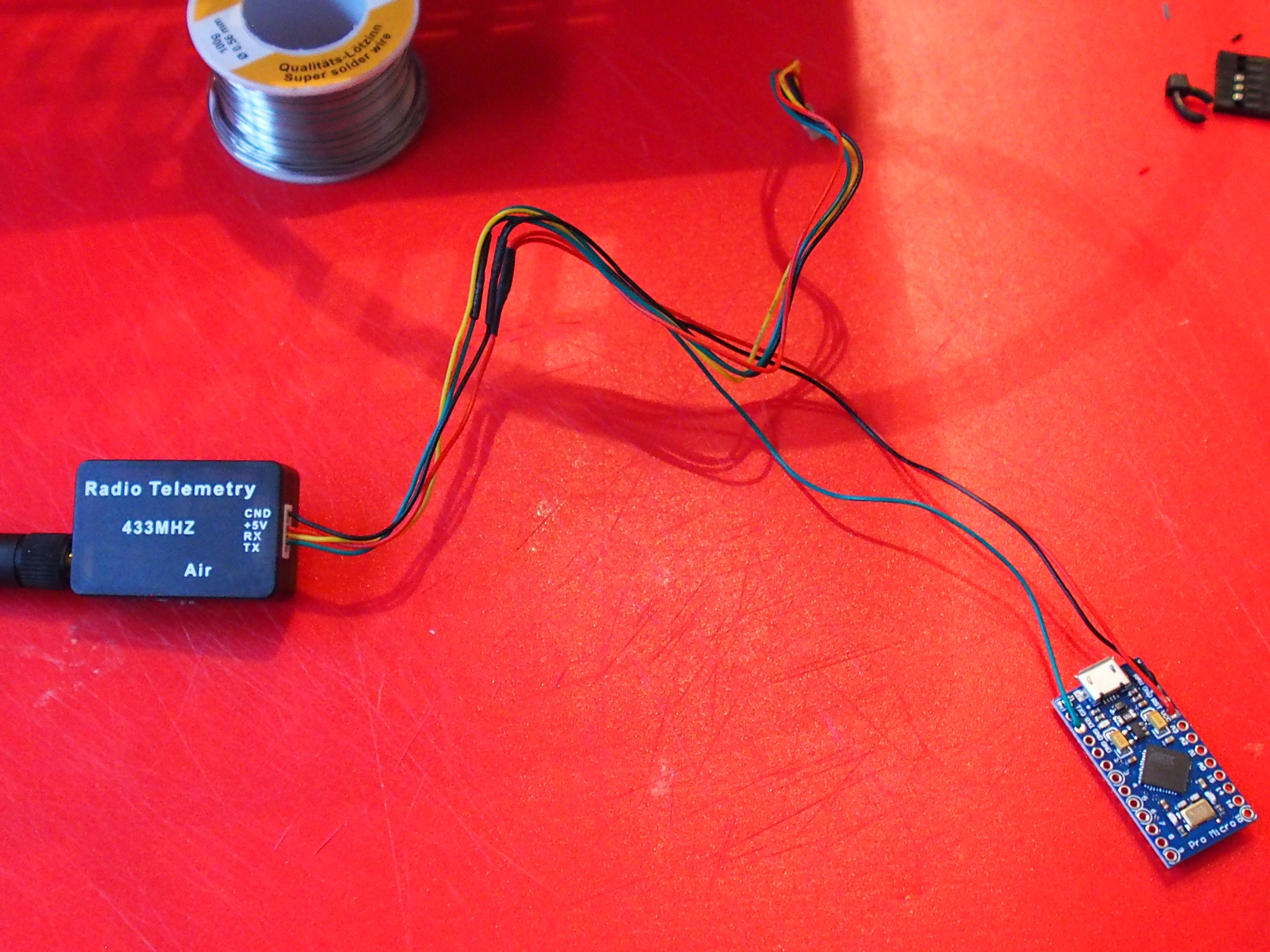
The translation between Naza-GPS and S.Port is done by an arduino nano which is connected to FrSky-S.Bus on Pin9 and to GPS Tx on Rx (also power from the receiver cable).
I used the software by Alezz in this thread but had to make some changes to get it running. My changed version is online at GitHub.
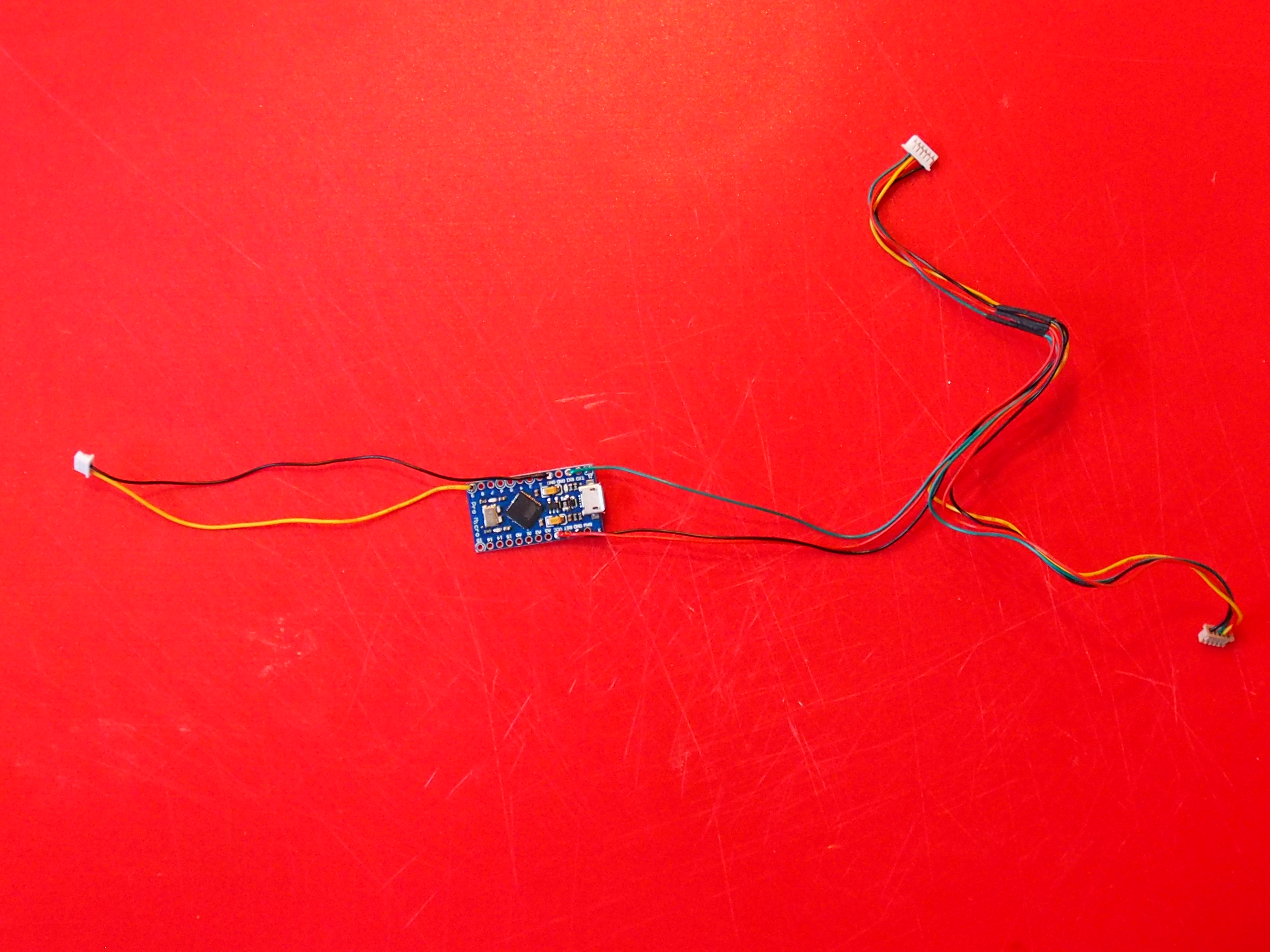
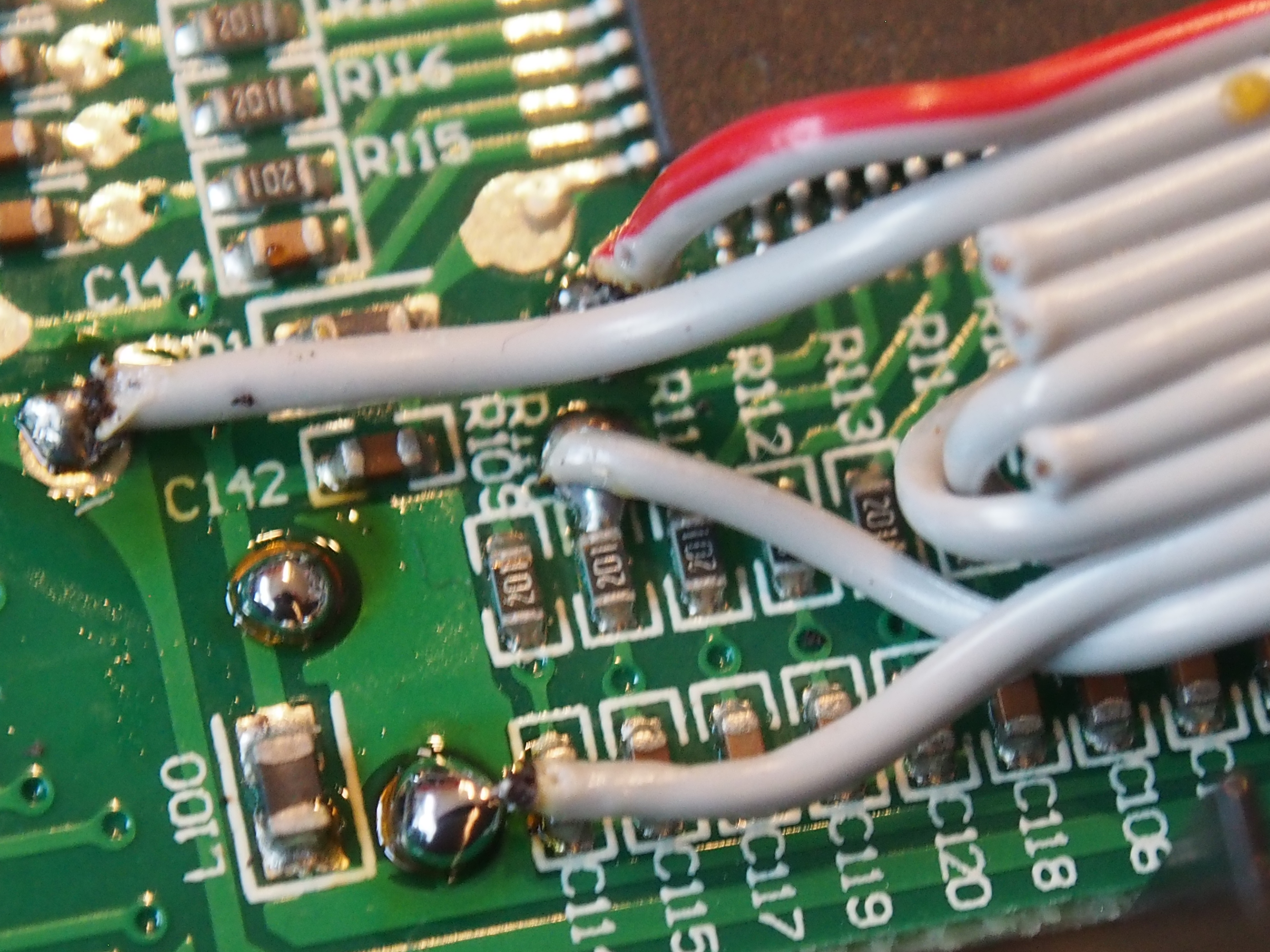
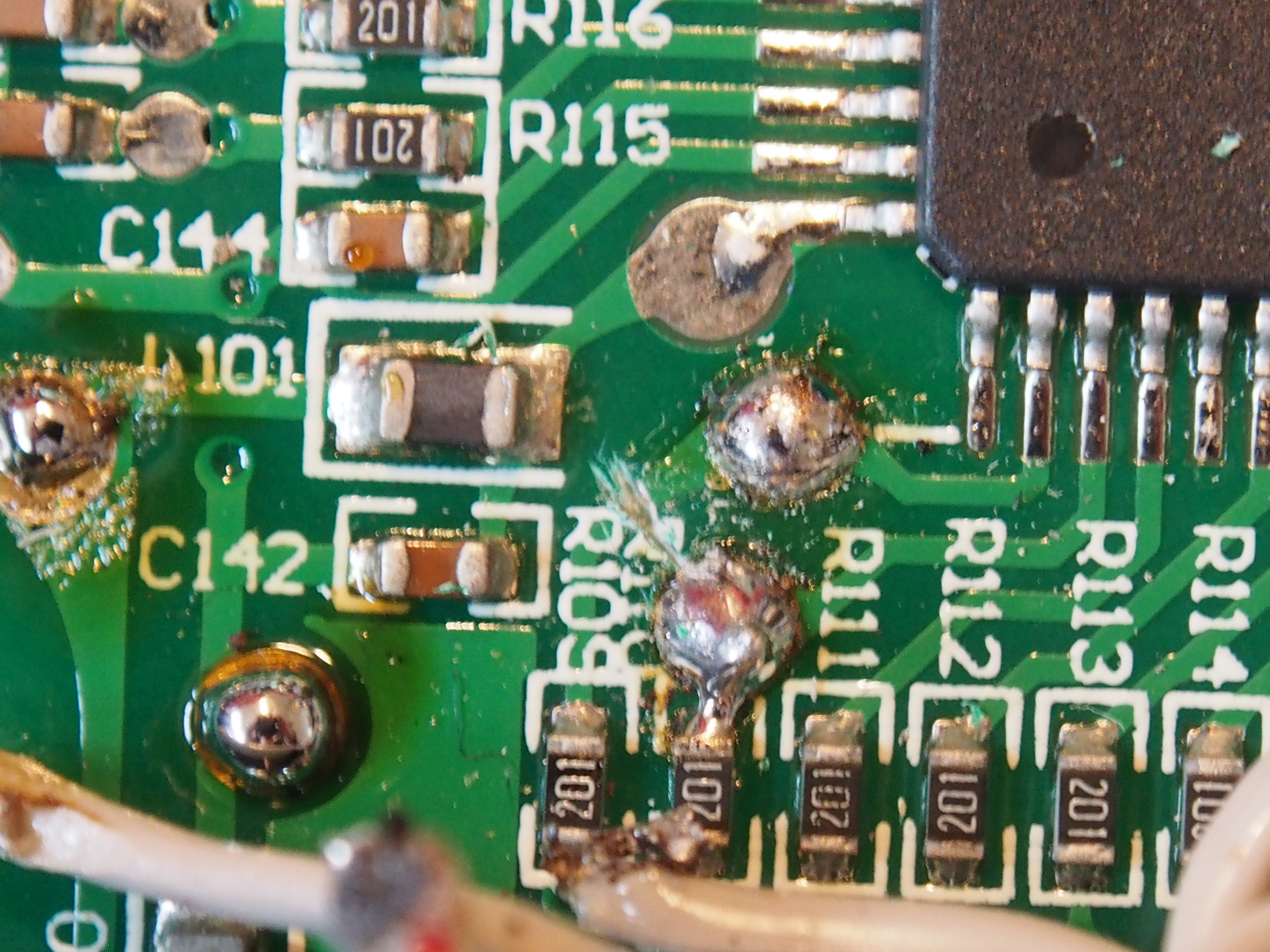
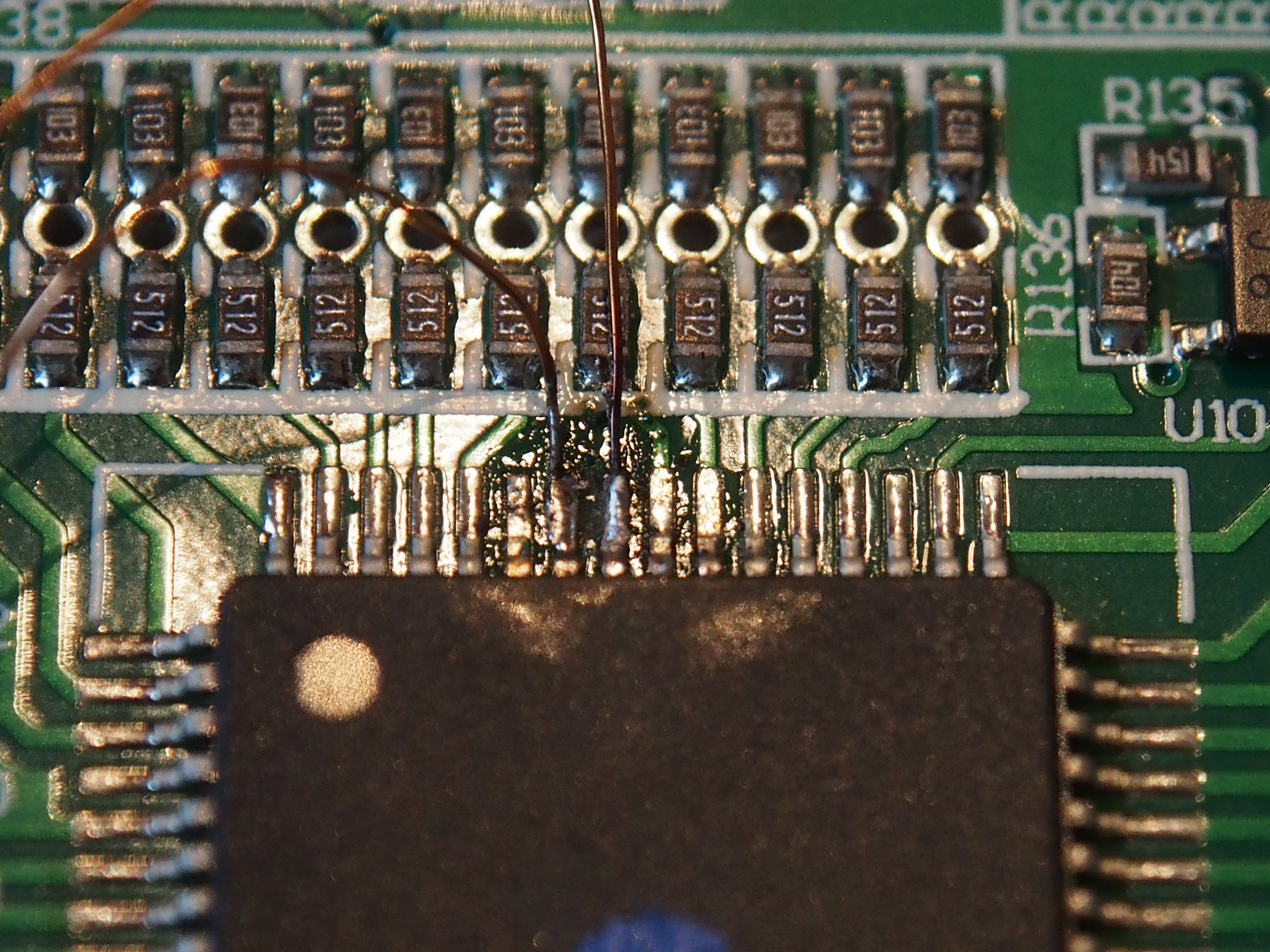
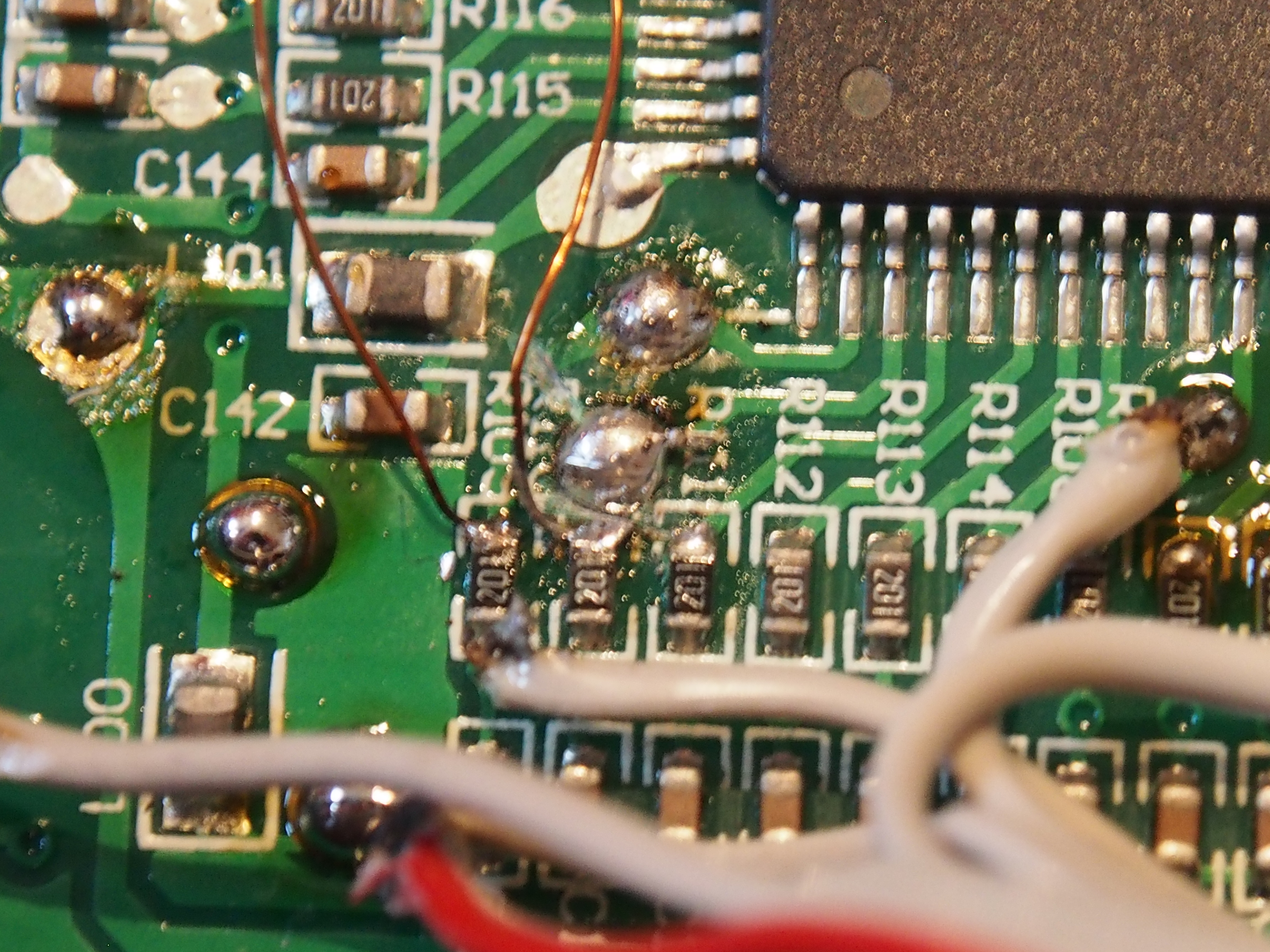
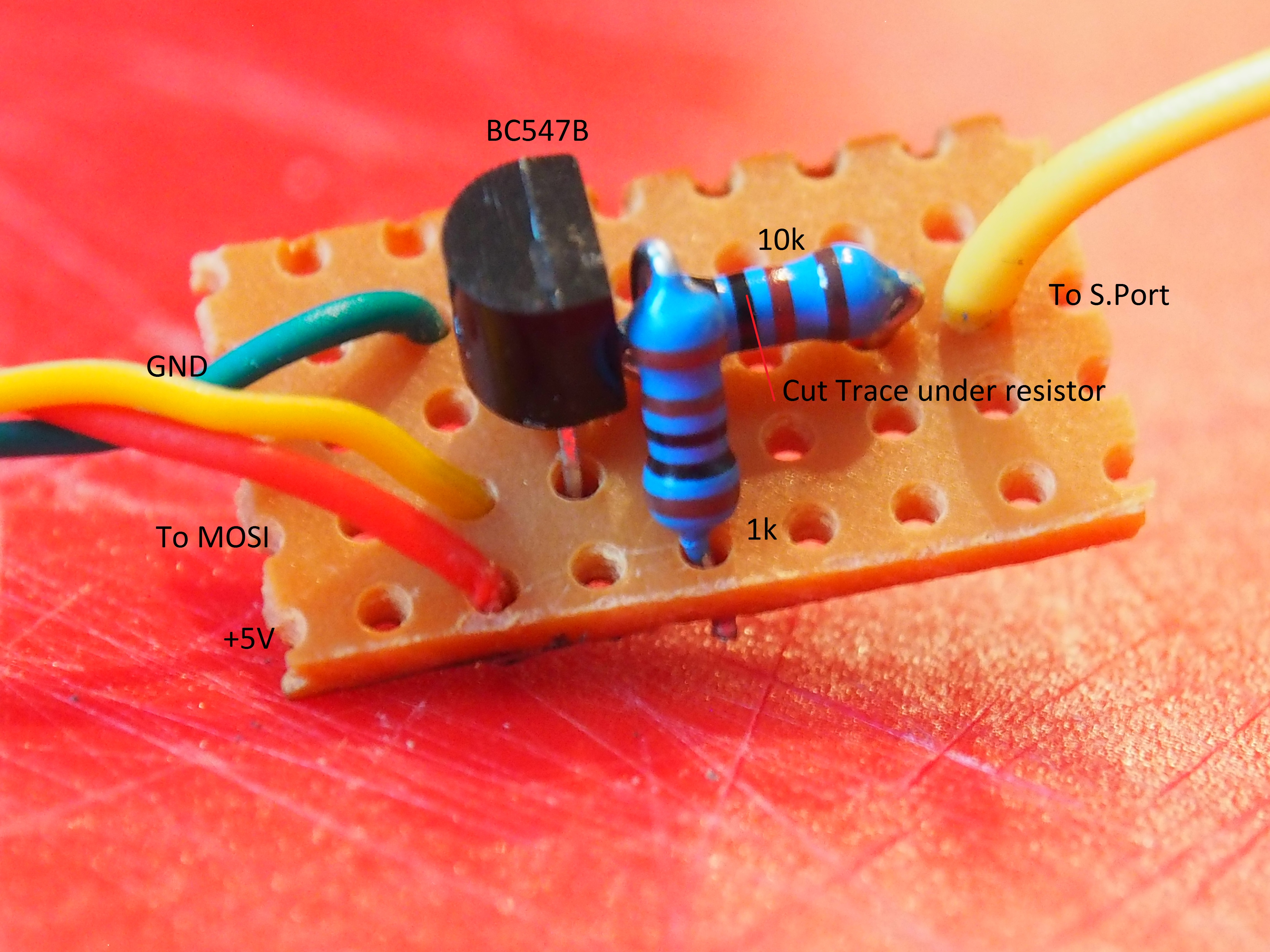
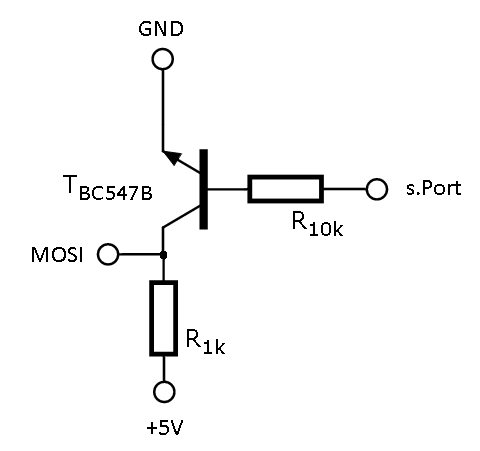
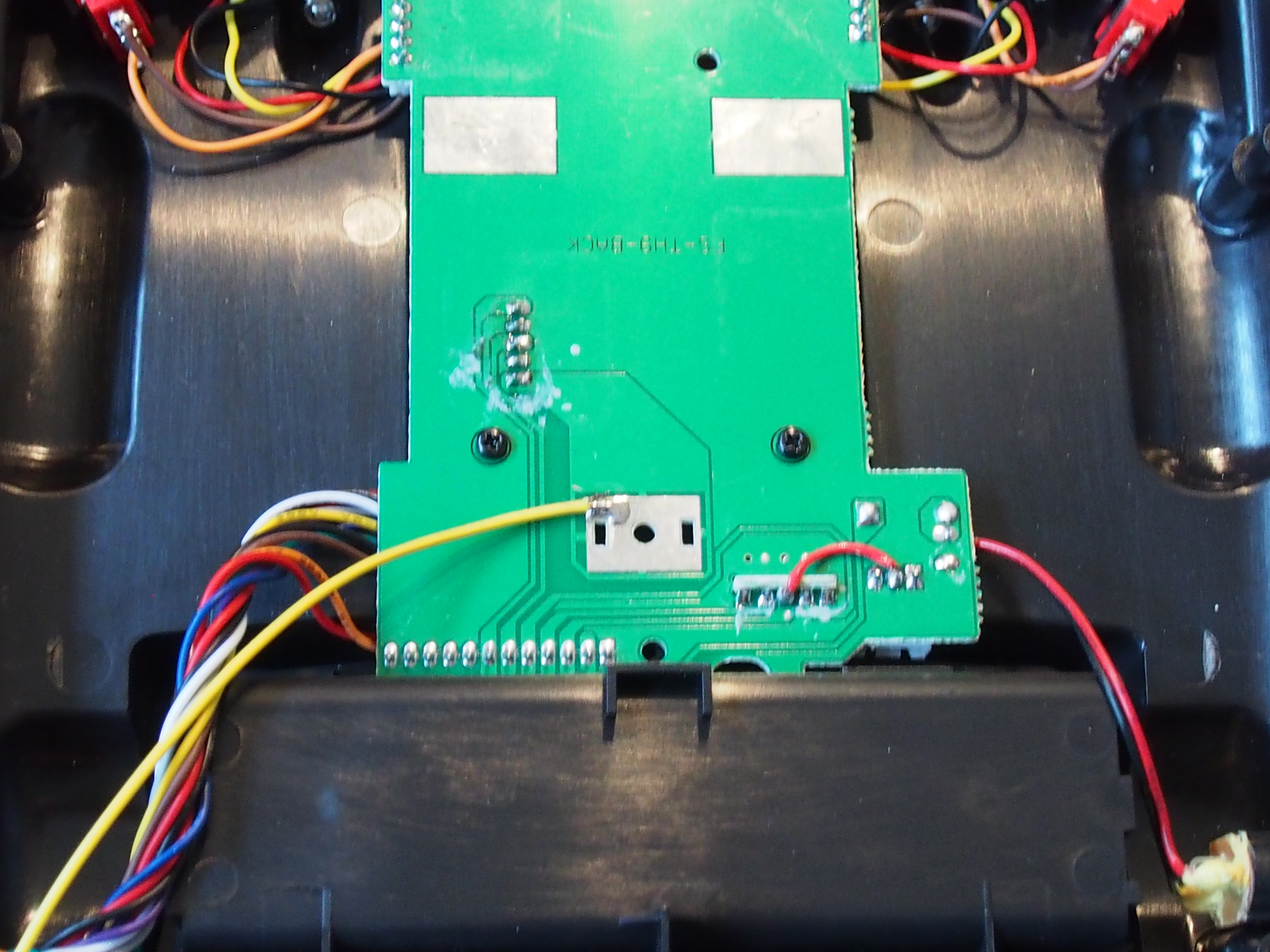
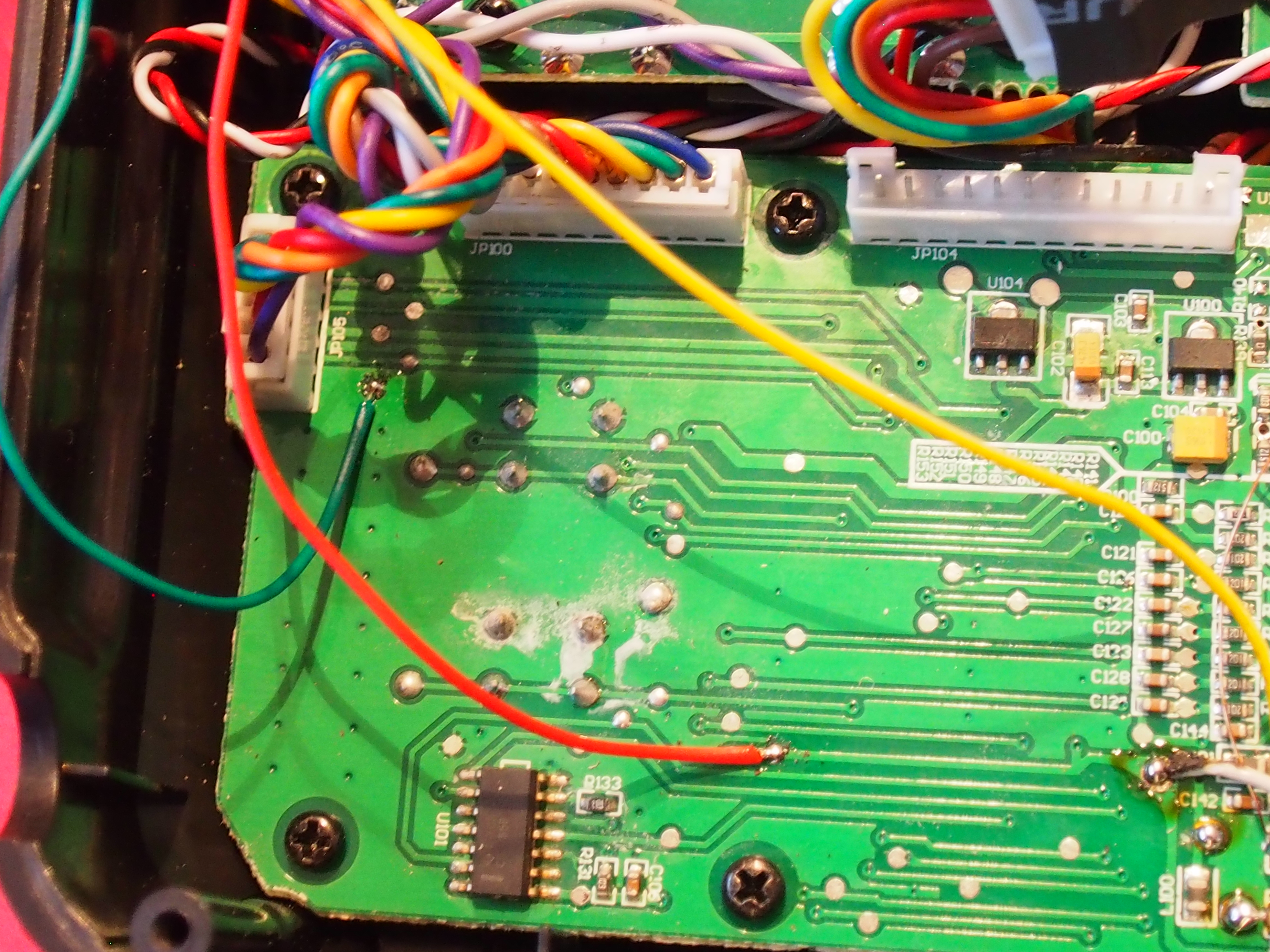
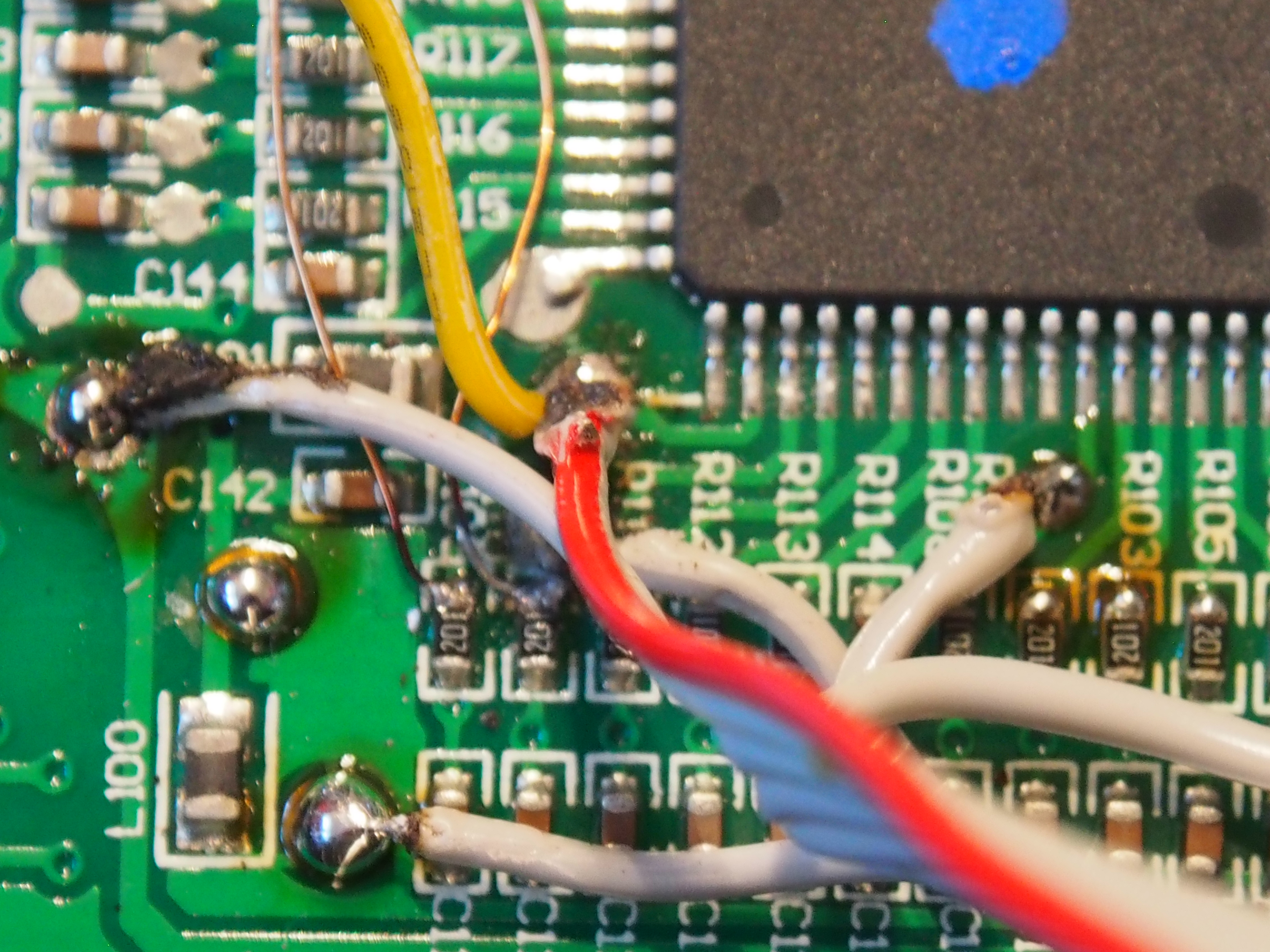
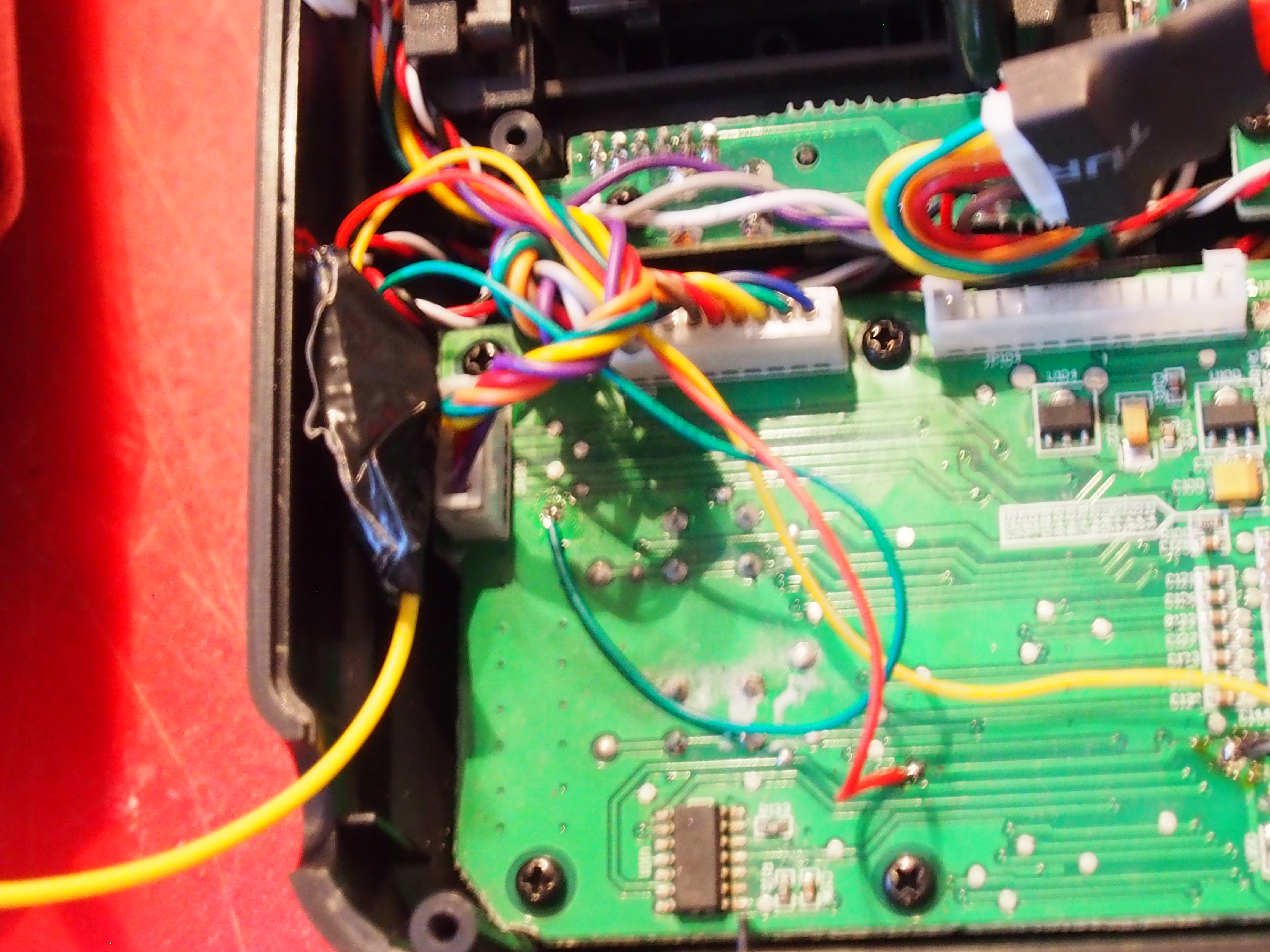
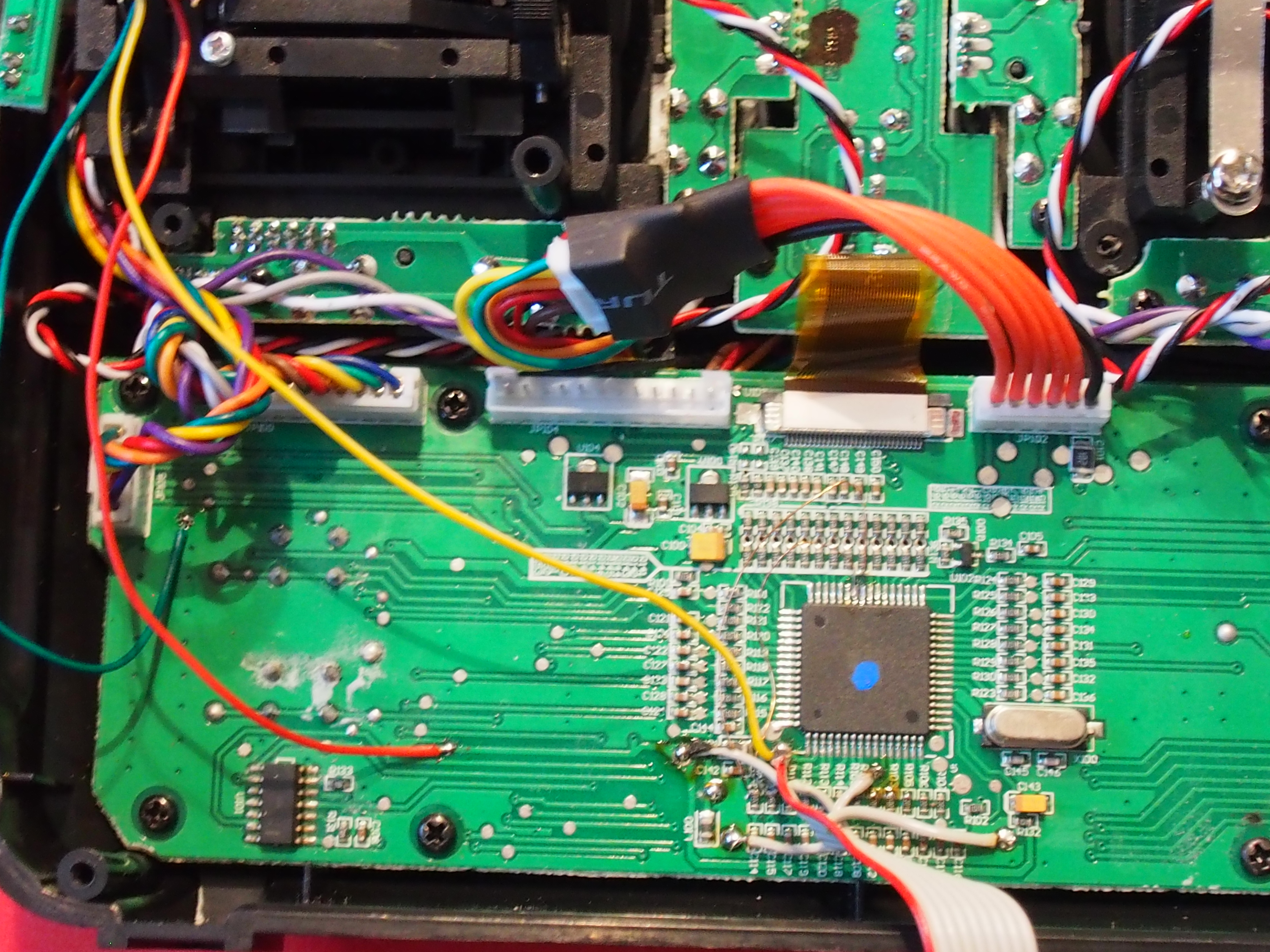
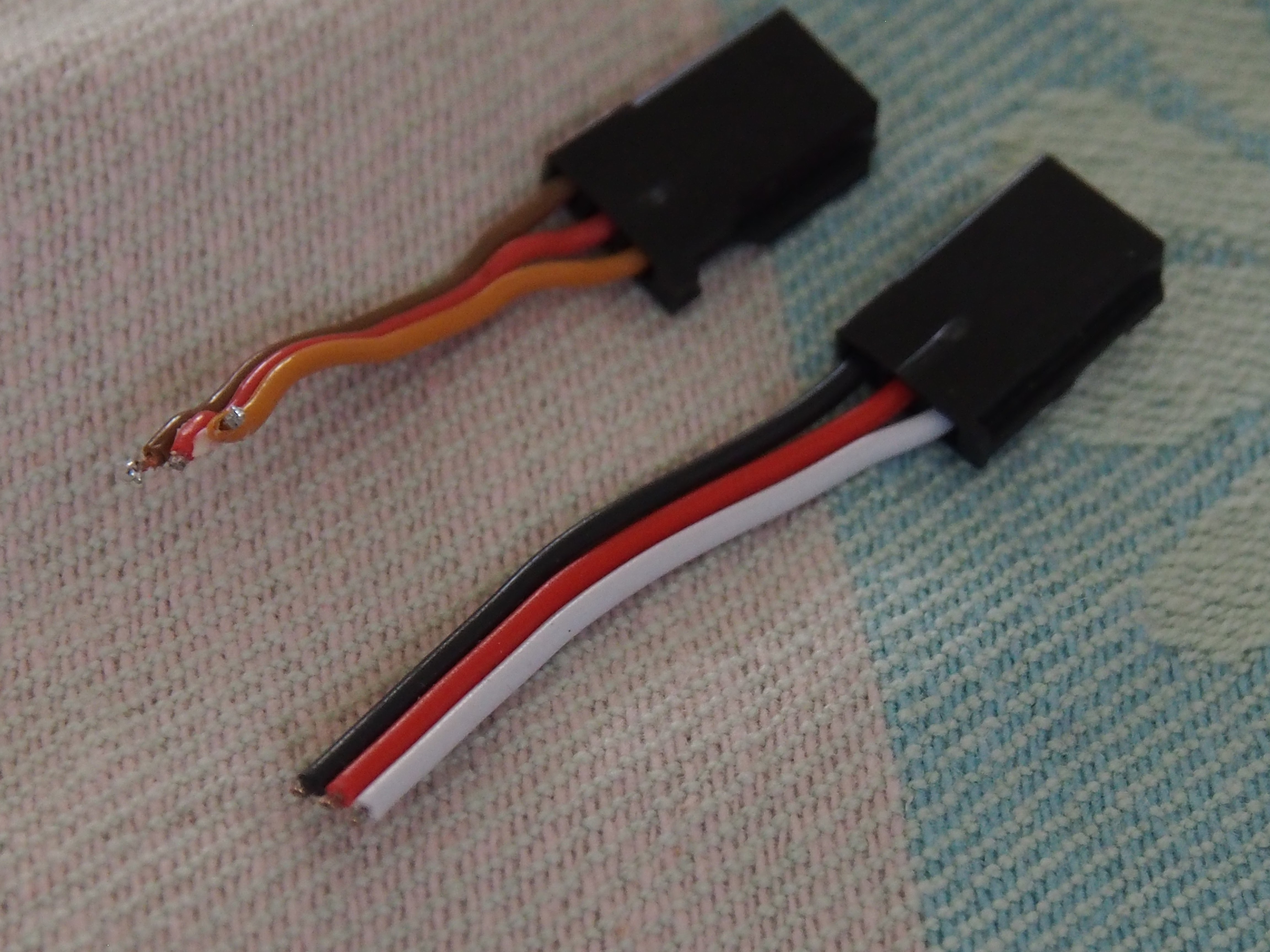
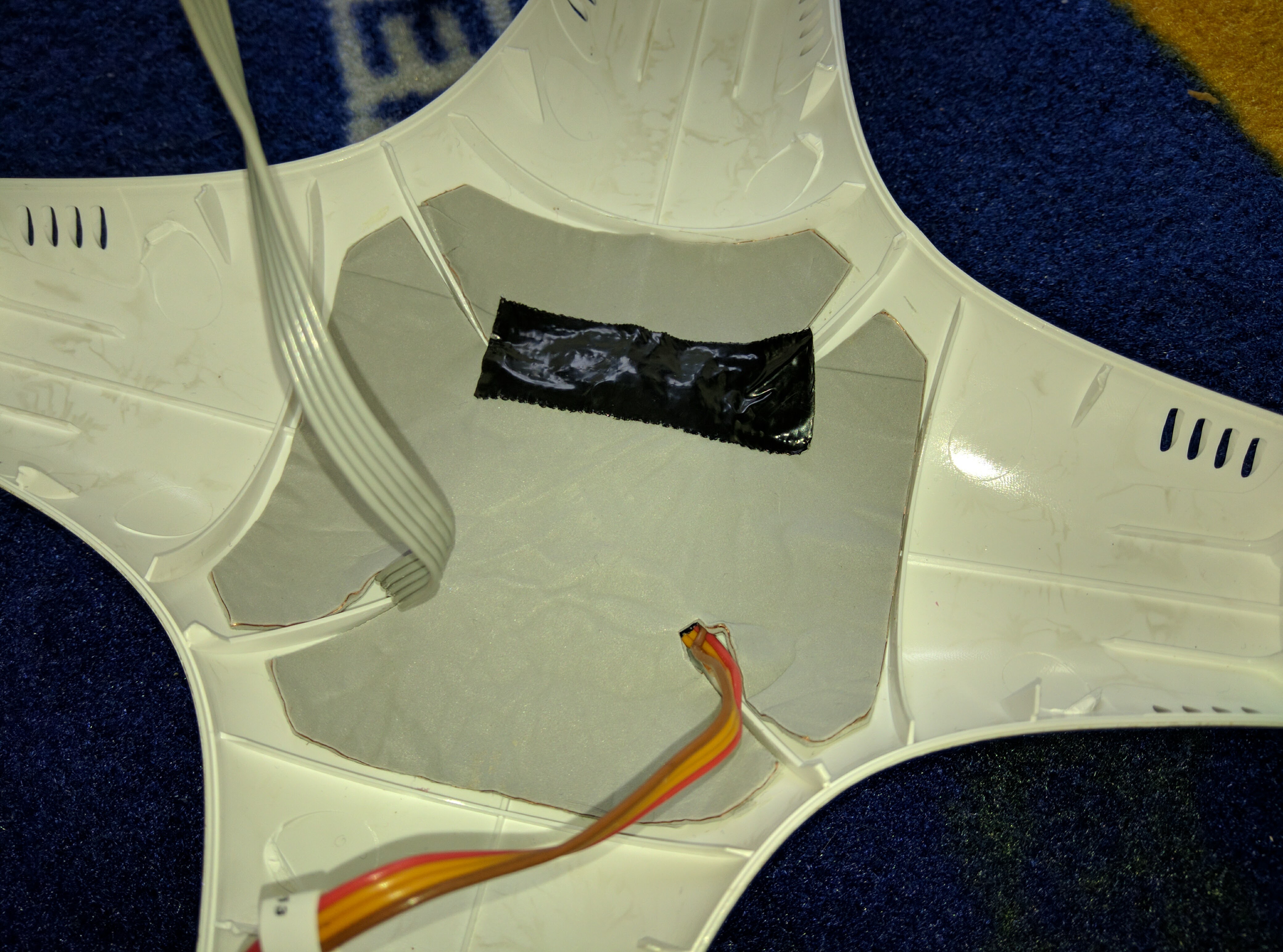
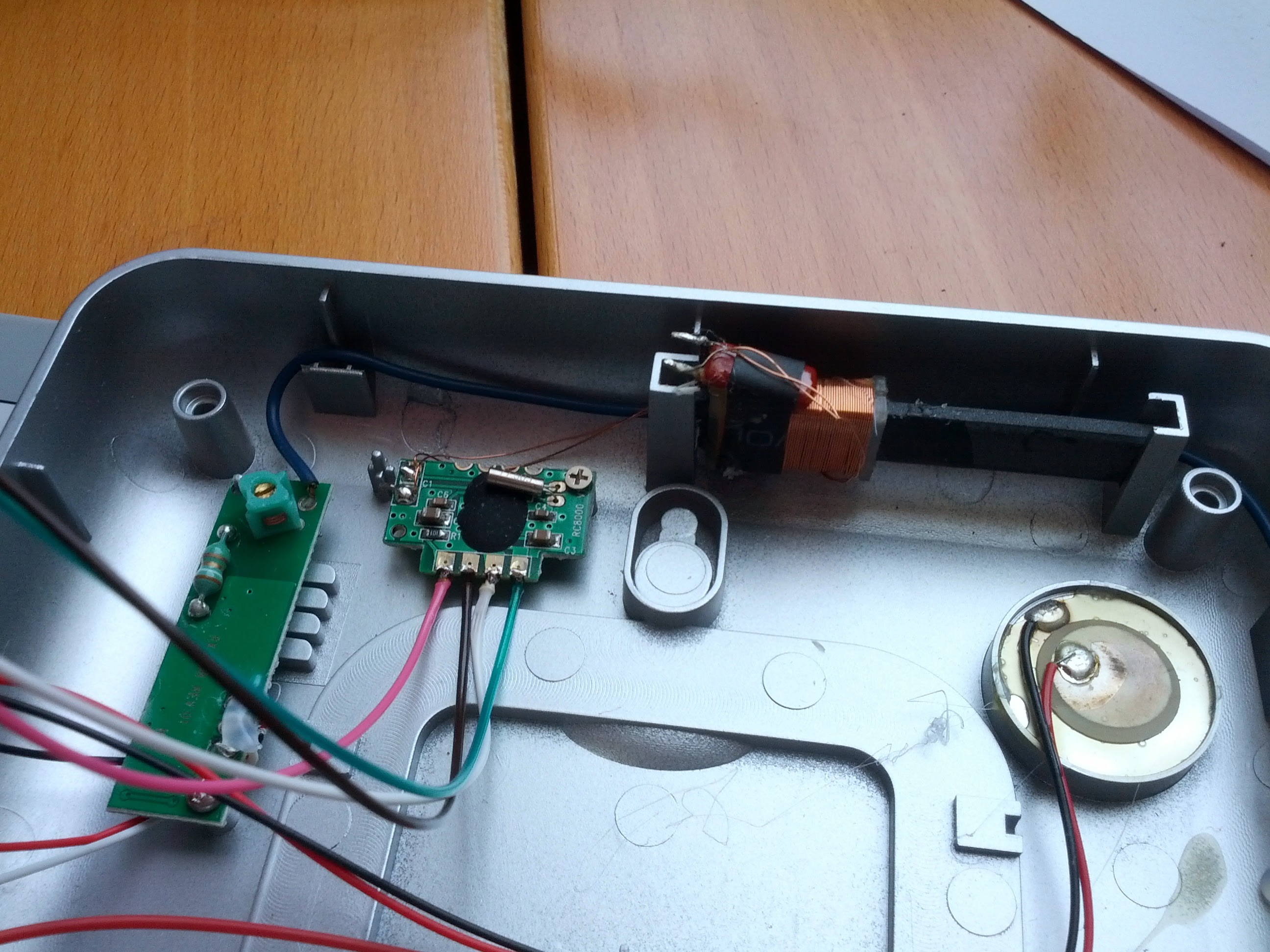
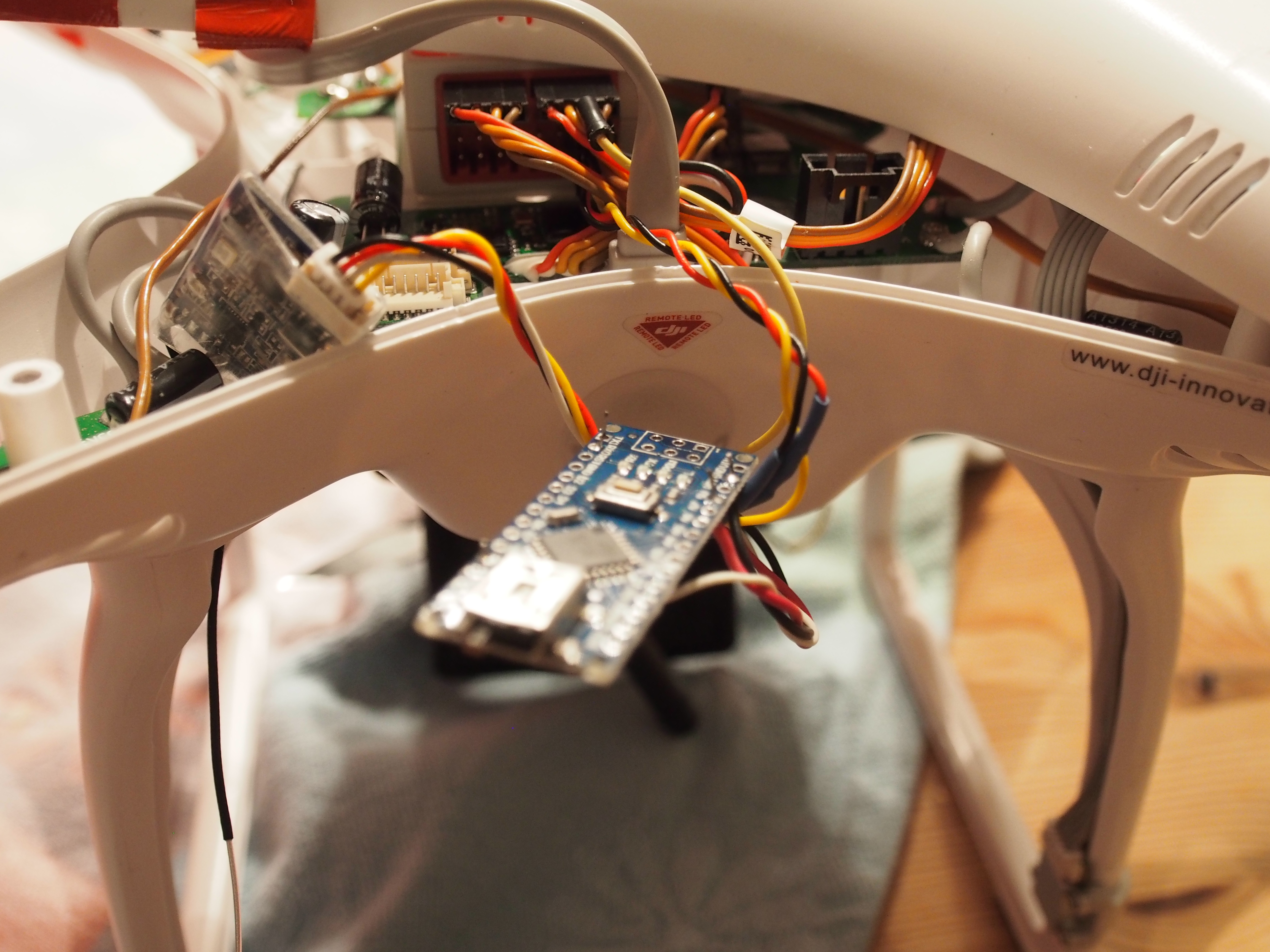
Here are some Pictures of the harness with the arduino and the Installation in the Phantom 1.
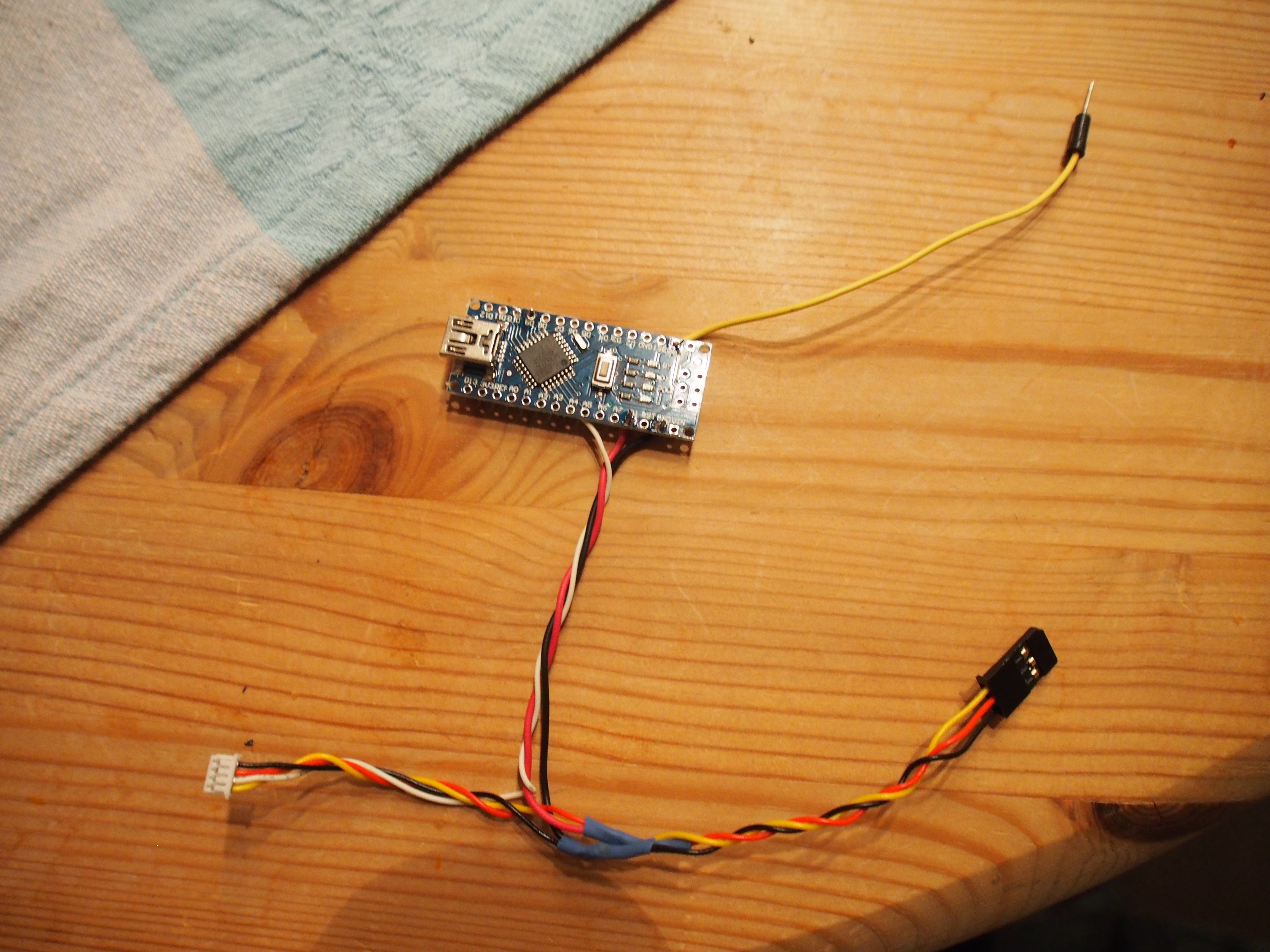
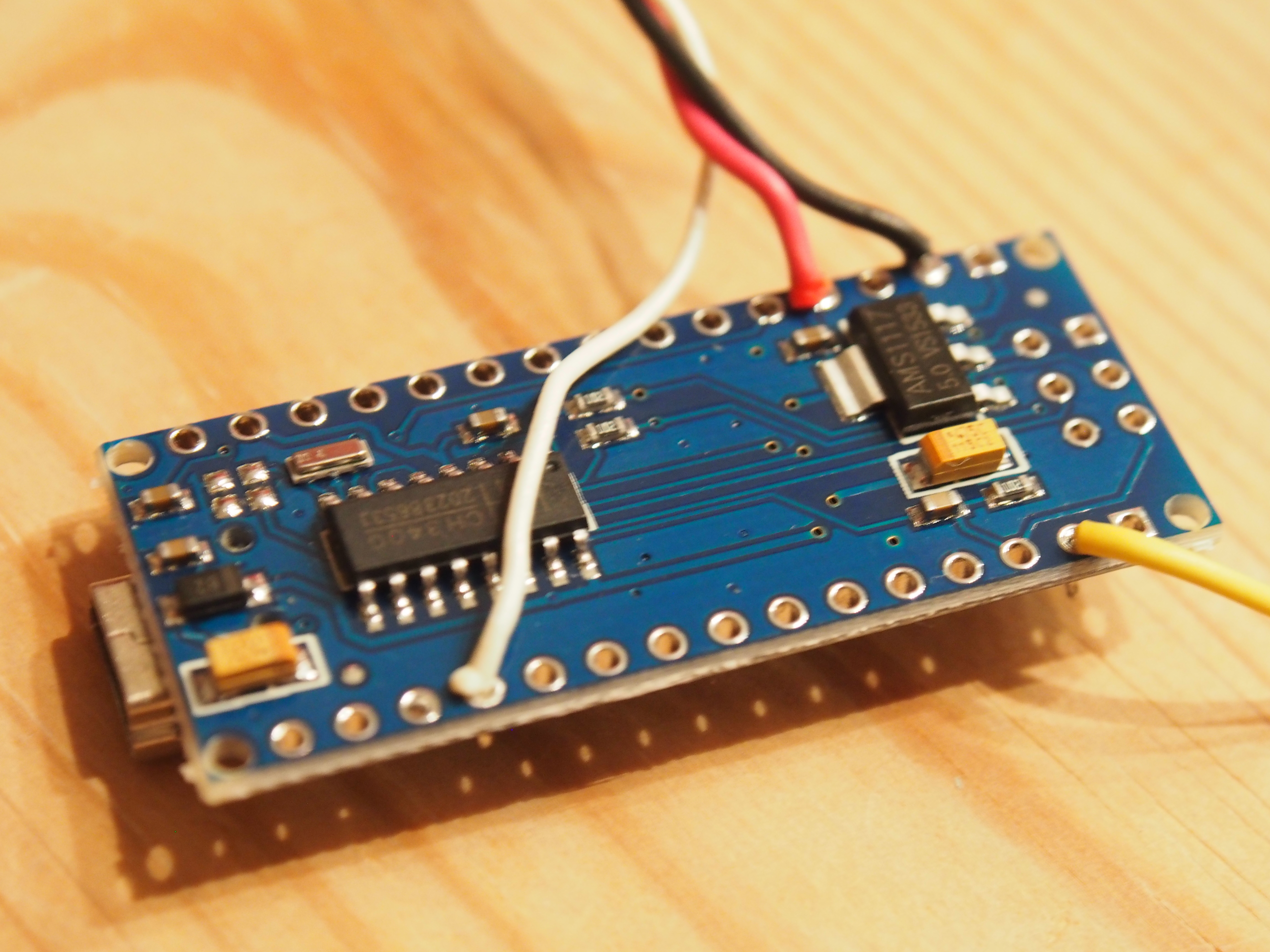
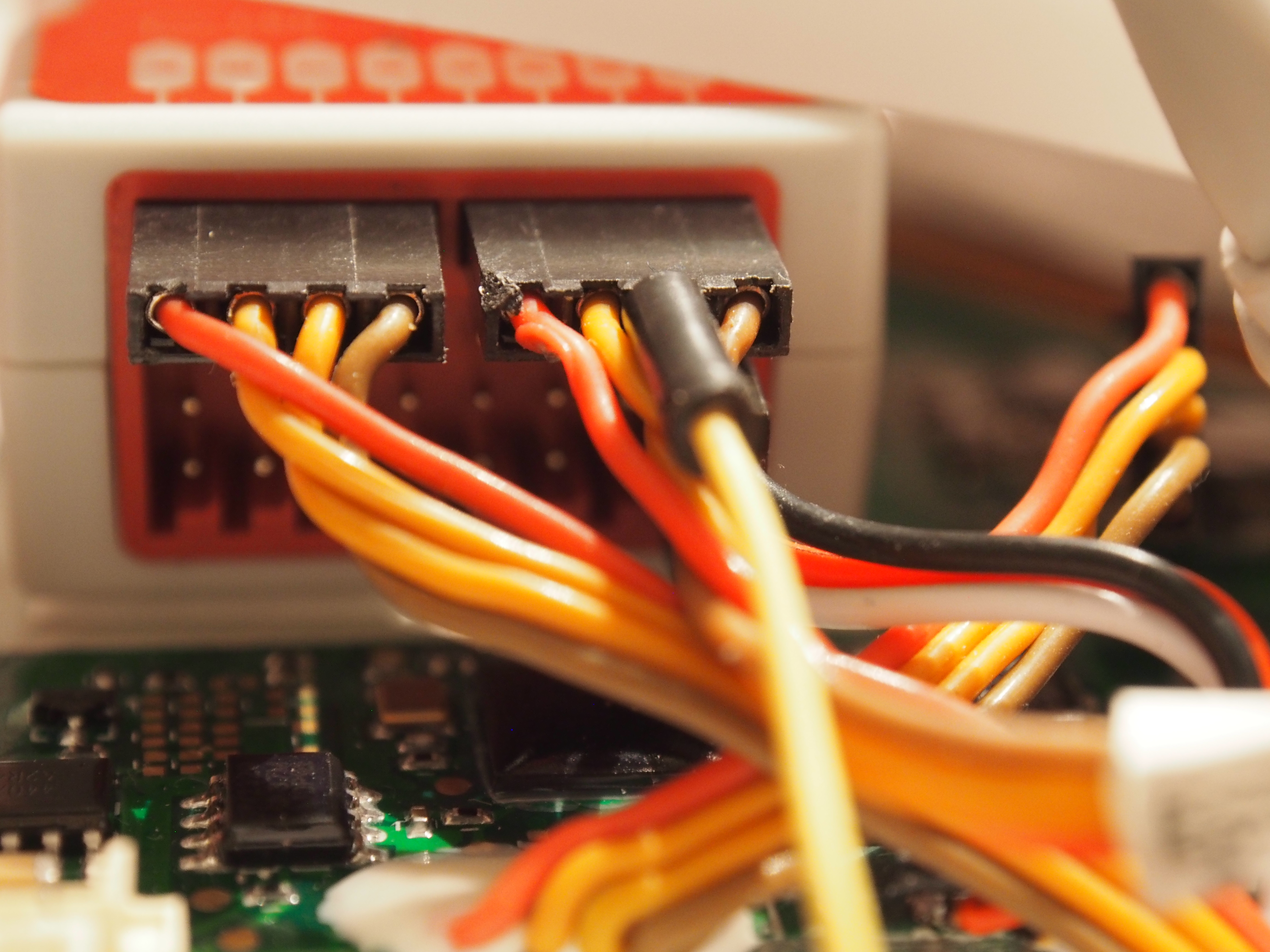
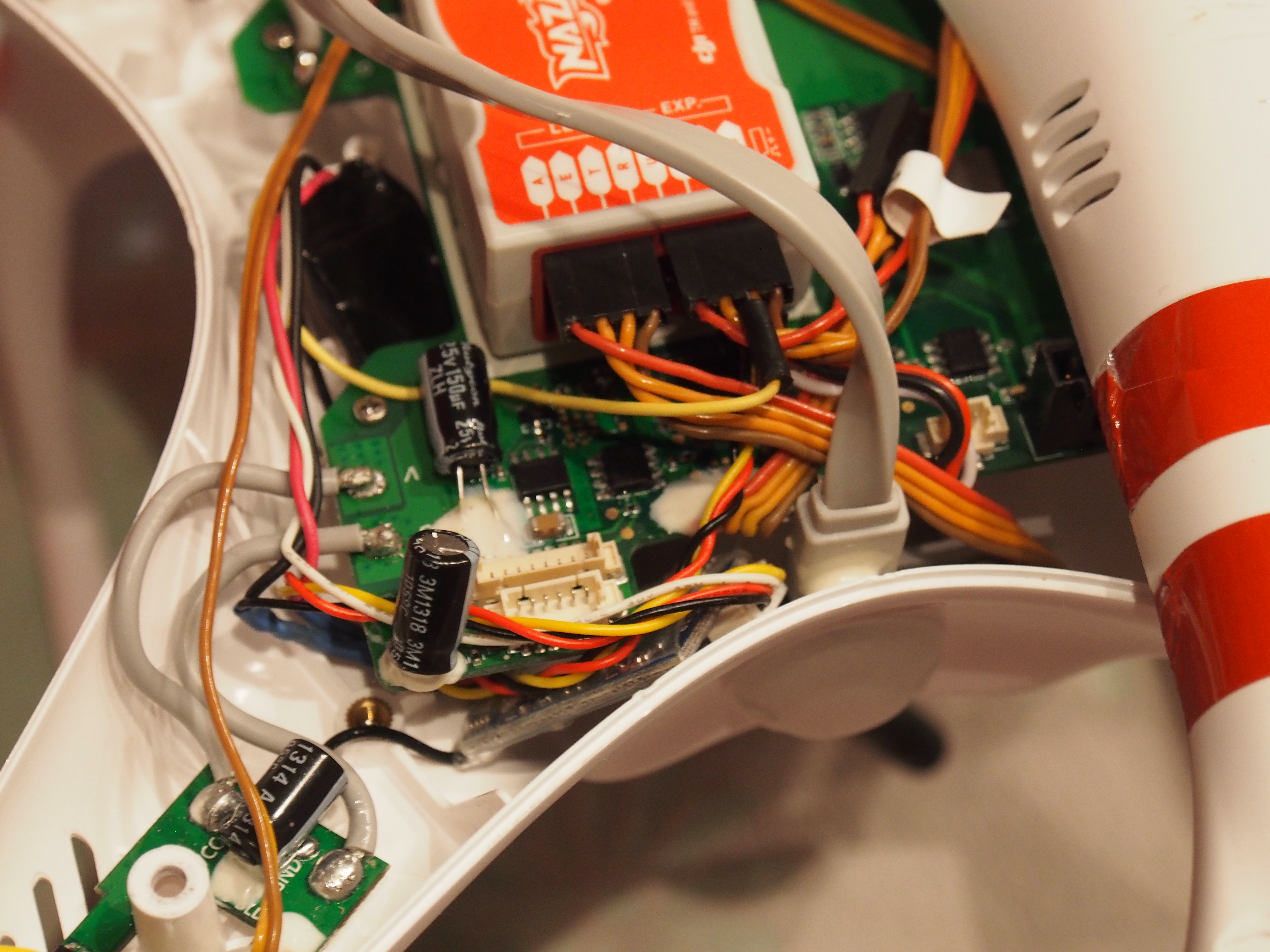
I didn’t want to cut the GPS connector, so I just pushed a jumper wire in the connector.
That was initially just for testing but made such a solid connection that this will stay in there.

The GPS Format in Degrees+Minutes formatted as DDMM.MMMM.
So 1234.5678 means 12°34.567′
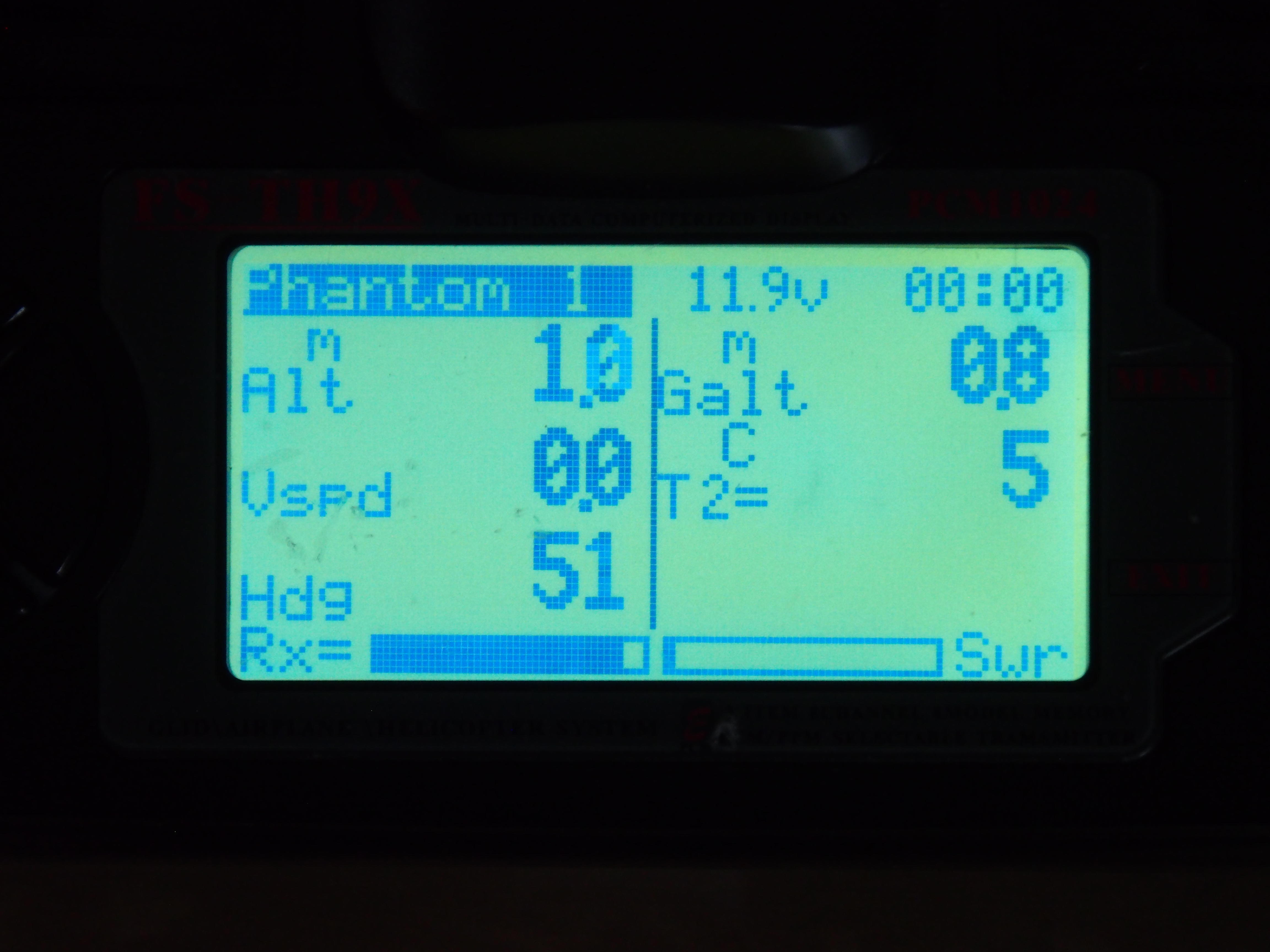
I still have some trouble with the GPS coordinates, sometimes just the Longitude will be transmitted and Latitude is just 000 but this will be updated as soon as I get further.
Also I’m a little confused about the “Alt” “Galt” and the “Alt” on the GPS screen. They all differ, but I will observe that during flight and remove the ones I won’t need from the arduino code.