I recently bought a cheap broken DJI Phantom 1 and would like to show you the process of analyzing and repairing the drone.
There were multiple problems, I will explain them one by one.
1. Phantom drops down when tilting
Problem

Here you can see that the phantom is hovering quite nice, but in the forward flight it suddenly falls down, all LEDs went off.
Cause
The Phantom has an internal USB cable which is connected to the microUSB port of the LED-module. This cable usually is hold in place by a cable tie and is accessible by the battery door.
In this phantom, someone removed that cable tie and the cable was flying around loosely, causing a short on the solder points of the battery connector or the power line for the speed controllers.
Solution
Fixed the cable with a cable tie. – Easy one…
2. Copter falls again midair
Problem
The Copter falls down while hovering, all LEDs stays on and starts beeping.
Cause

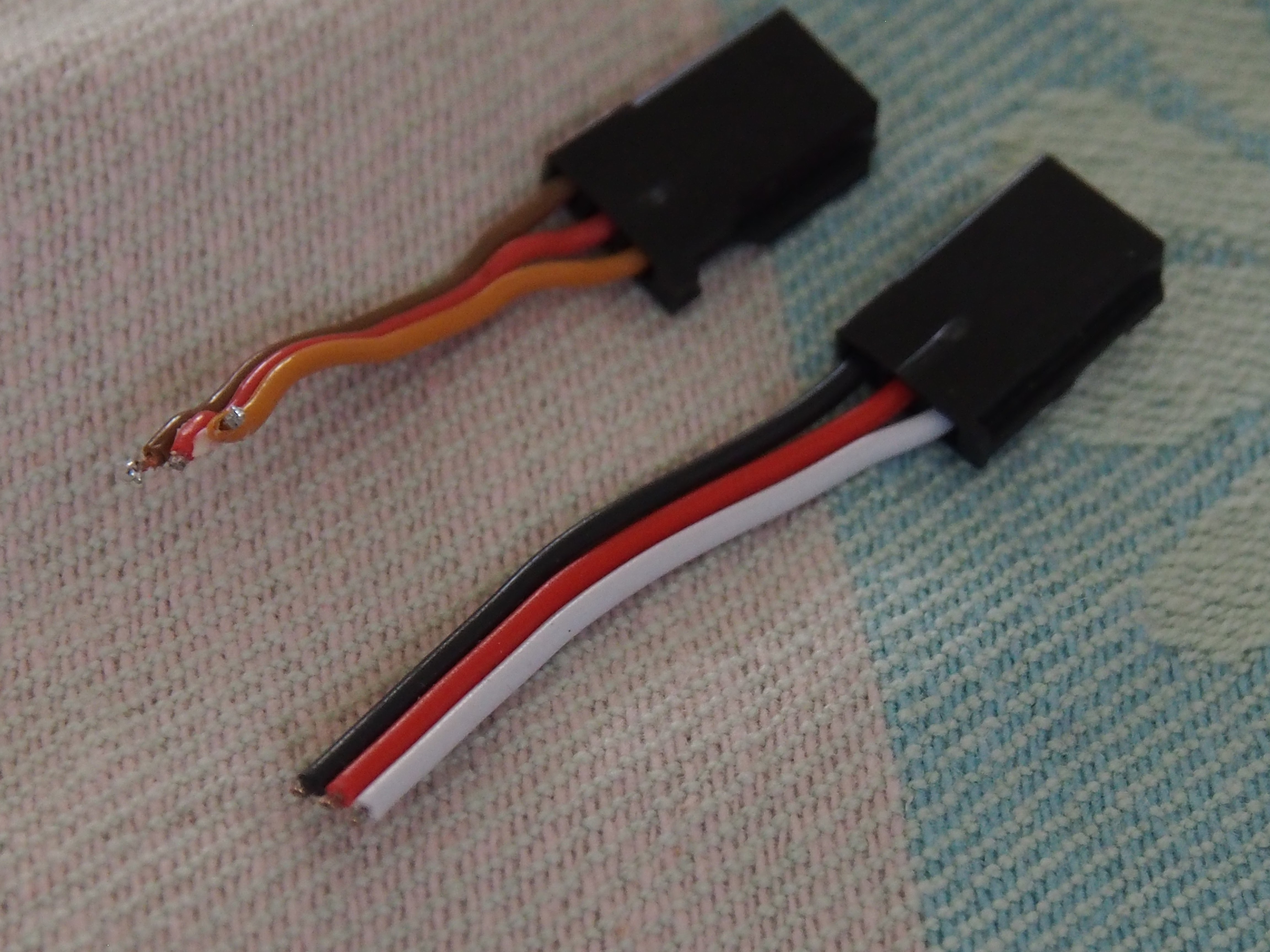
The X3 connector from the PMU-board to the Naza is the power source for the flight controller. The red wire is the +5V line which has a loose connection on the board, although covered in the white protective glue.
Solution
I simply replaced the cable with a new one…

Easy to fix, hard to find.
3. Copter wobbels in ATTI mode – (really easy one)
Problem
When flying in ATTI-mode (Stabilized, without GPS), the copter starts to shake and wobble.
Cause
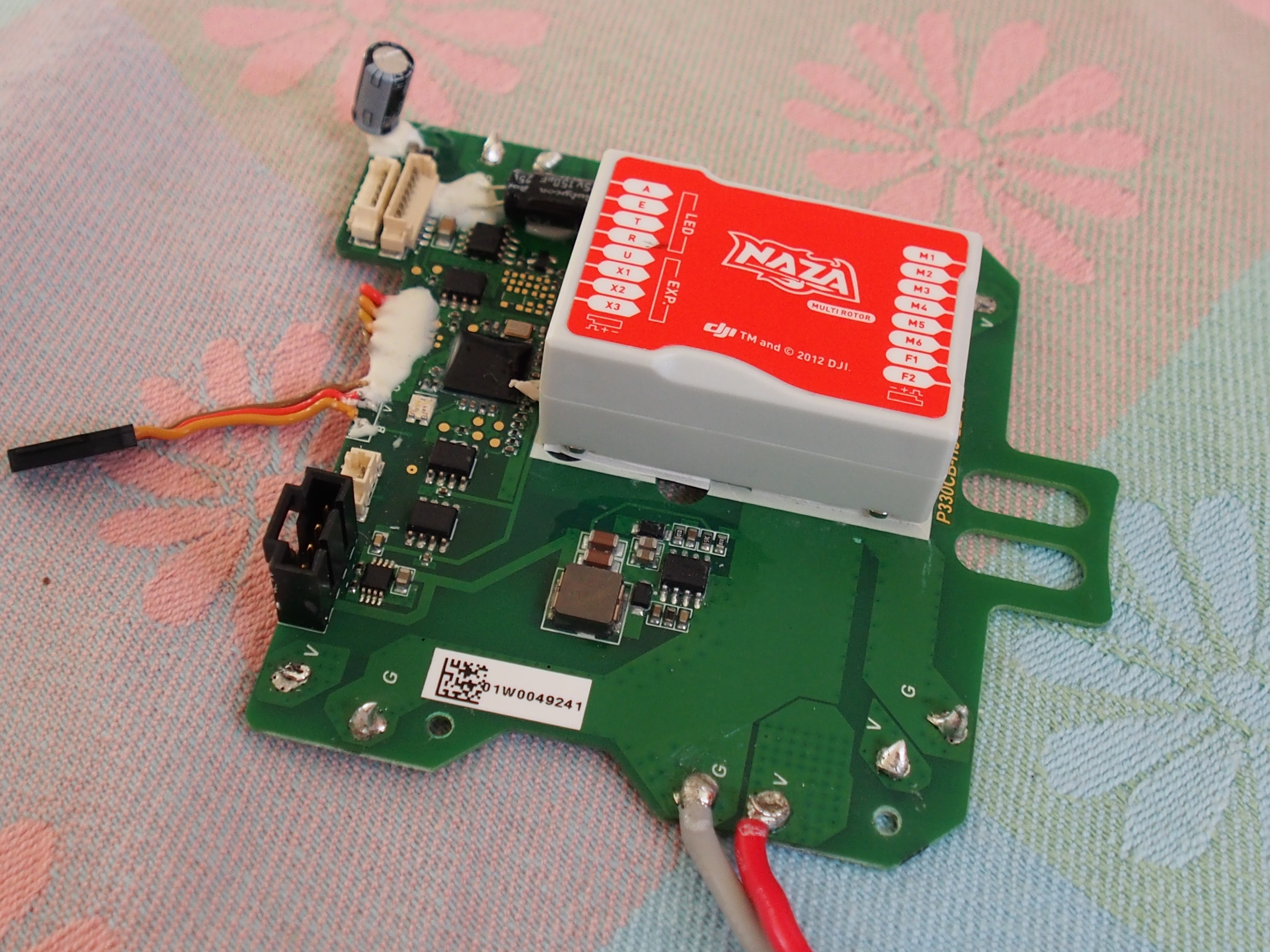
The previous owner changed the default board with the PMU-One for a zenmuse gimbal. The Naza (which contains the gyro sensors) is usually glued to the board with foam pads.
In this case, it was glued with superglue, wich won’t adhere to the coated PCB. So the Naza became loose and was just hold by the cables. I was impressed how stable it stays with this in GPS mode!
Solution
Fixed the Naza with foam tape.
4. Phantom randomly switches from GPS to ATTI mode
Problem
During a GPS flight, the LED randomly turns yellow for a few seconds and the copter starts drifting which means that it switched to ATTI mode.
Cause


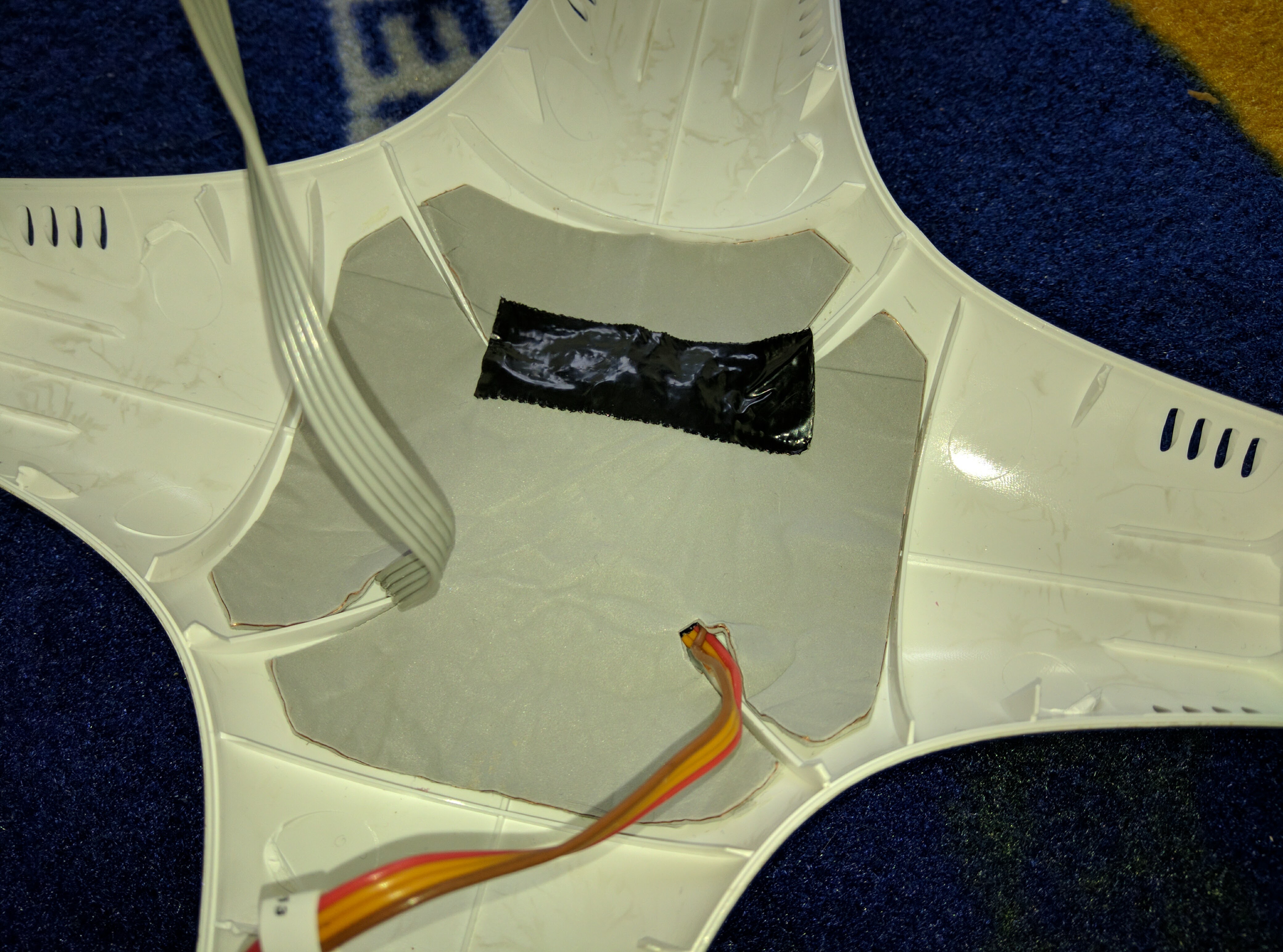
In the upper shell of the phantom is the GPS module which contains the antenna. To reduce interferences from the regulators, it is shielded with a rubber coated copper foil.
This foil was lacerated and the the copper foil wasn’t insulated on some parts. These touched the GPS module and randomly caused it to fail.
Solution
Just added some duct tape as insulation between the module and the copper foil.
Now, it seems to fly very stable and reliable. There are already further modifications queued…