Why the existing player was not enough
Three years ago, I added a DVB-T receiver (DVB1184 bycarmedien) to my car. This one also provides a media player which I thought was a really cool feature.
I’m very satisfied with the quality of the TV-Component of that device, but what they call “media player” is really crap!
The filenames are limited to 8 characters so you can’t distinguish videos of the same series, also there is no way to play a music playlist.
Here is a small video showing the TV-mode and the mediaplayer:
Next to the media-player’s USB-port, there also was one called ‘UPDATE’ so I was patient and waited for an improved player now three years long – but there was no update.
The idea
On day on the way back home from work i thought how it cool would it be to have a “real” mediacenter in the car, like XBMC?
Based on this idea I started to think about replacing the existing media player with something like a Raspberry Pi running RaspBMC or so.
The inputs on the receiver are switch with a “Mode” button on the remote like following:
TV -> Media -> AUX -> TV
The remote works for TV and the mediaplayer as well.
The appearance of the media player seams like another input device inside the receiver, so let’s open it up!
Proof of concept
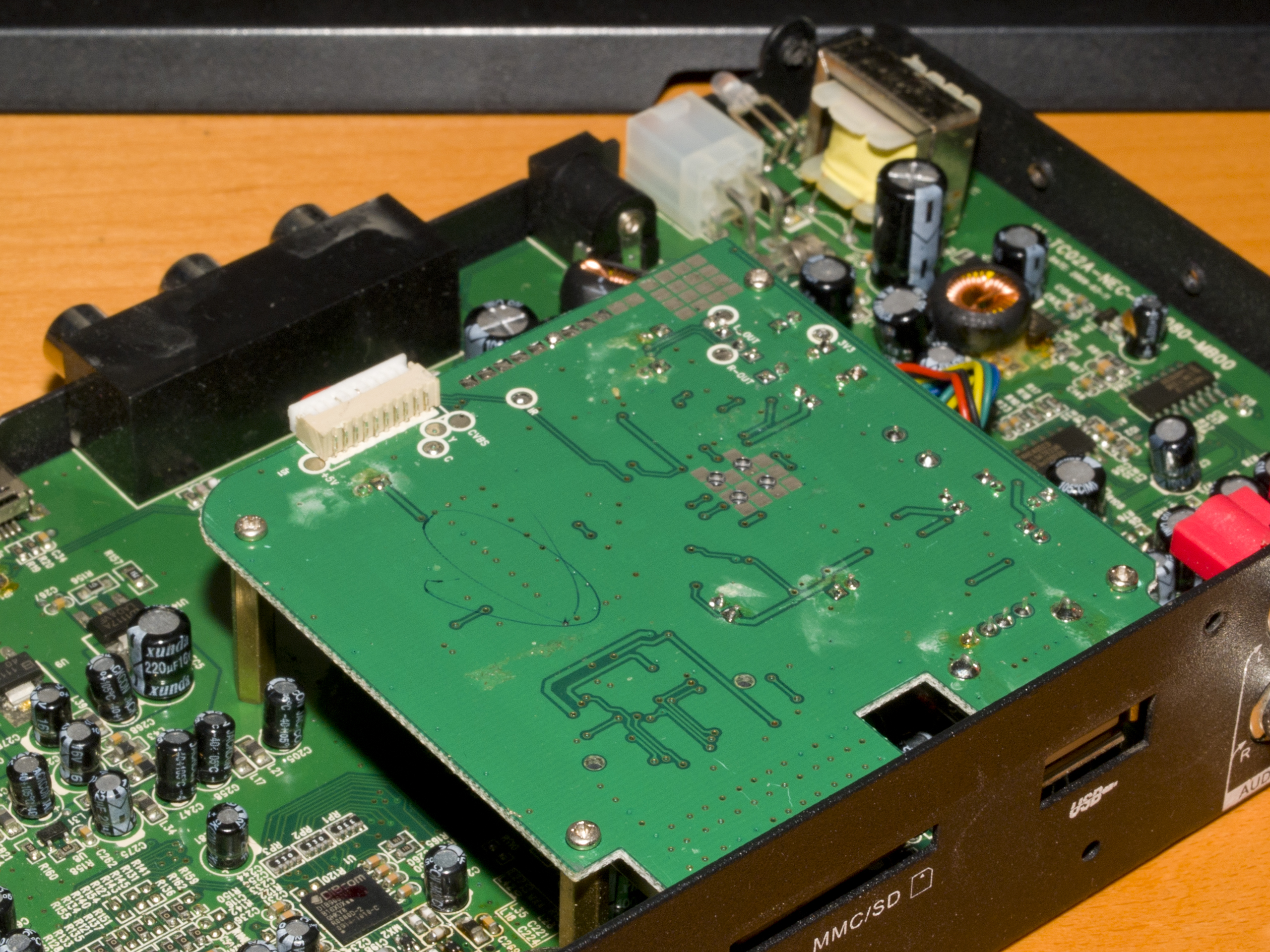
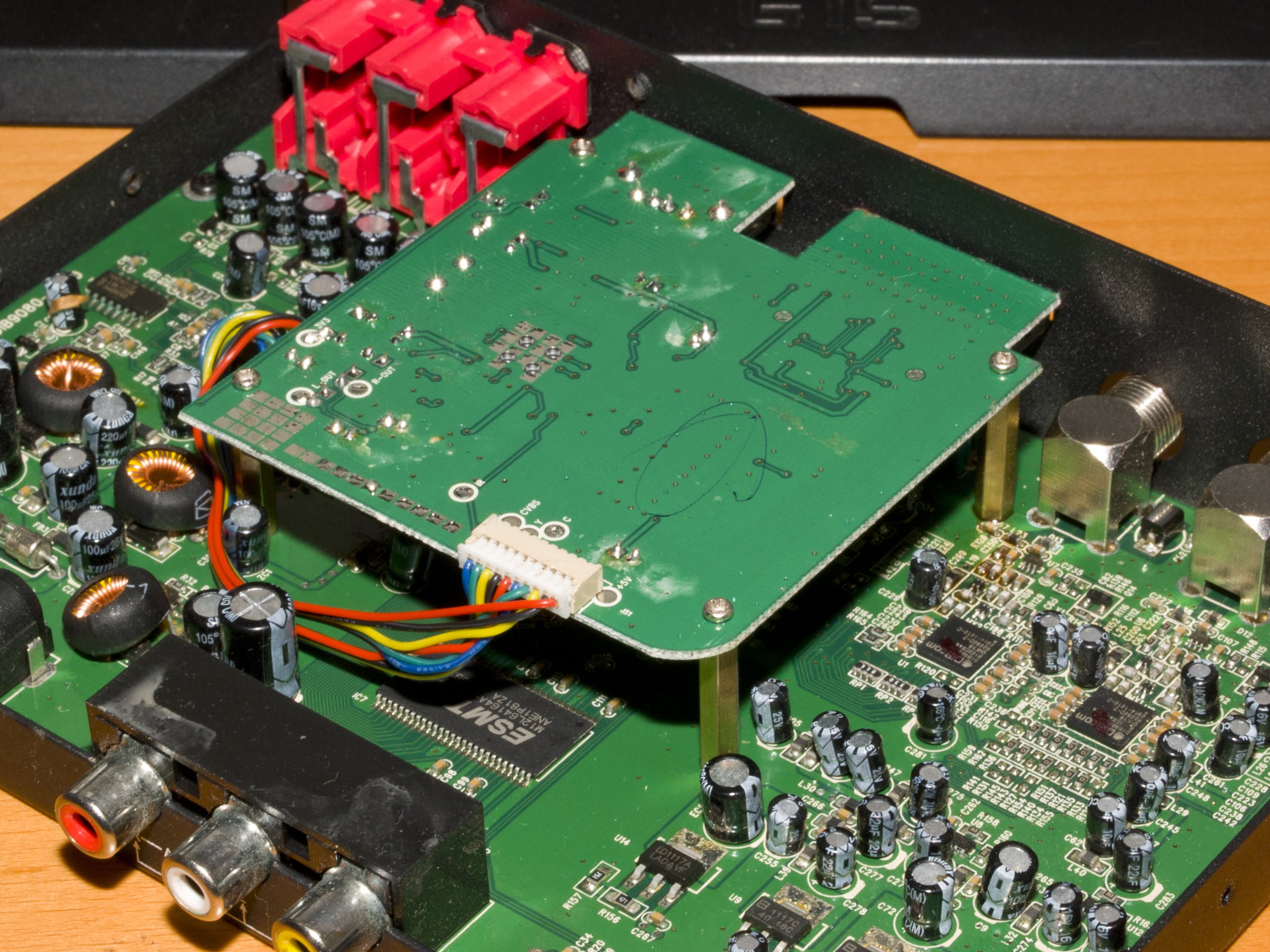
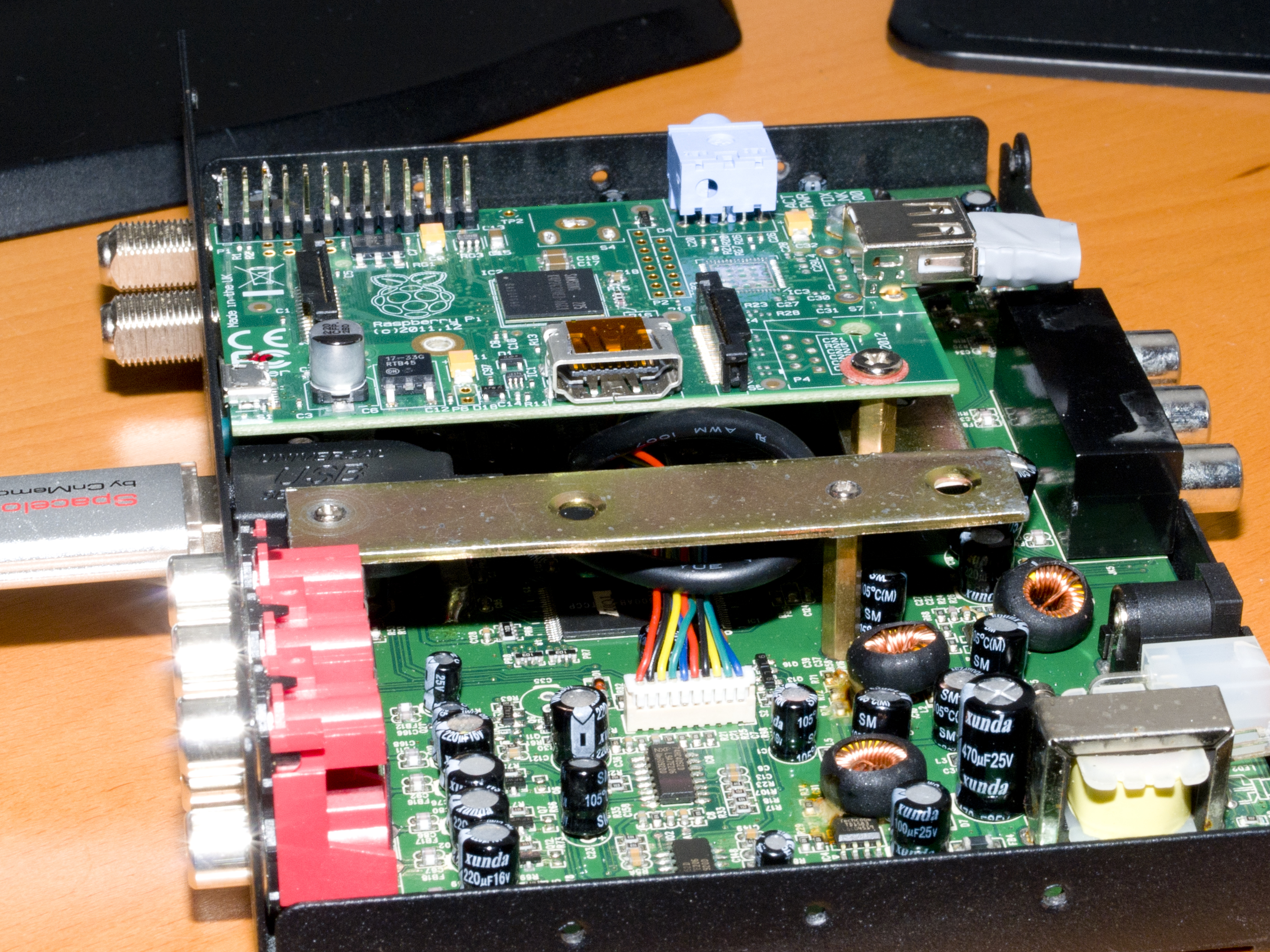
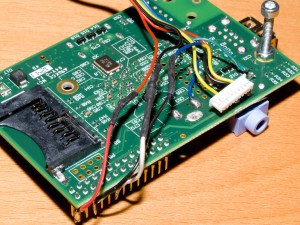
At the same day I got the idea, I took the receiver to my workbench and took a look insde. What I found there, really surprised me: The SD and USB-slots lead to a separate PCB what seams to be the media player:


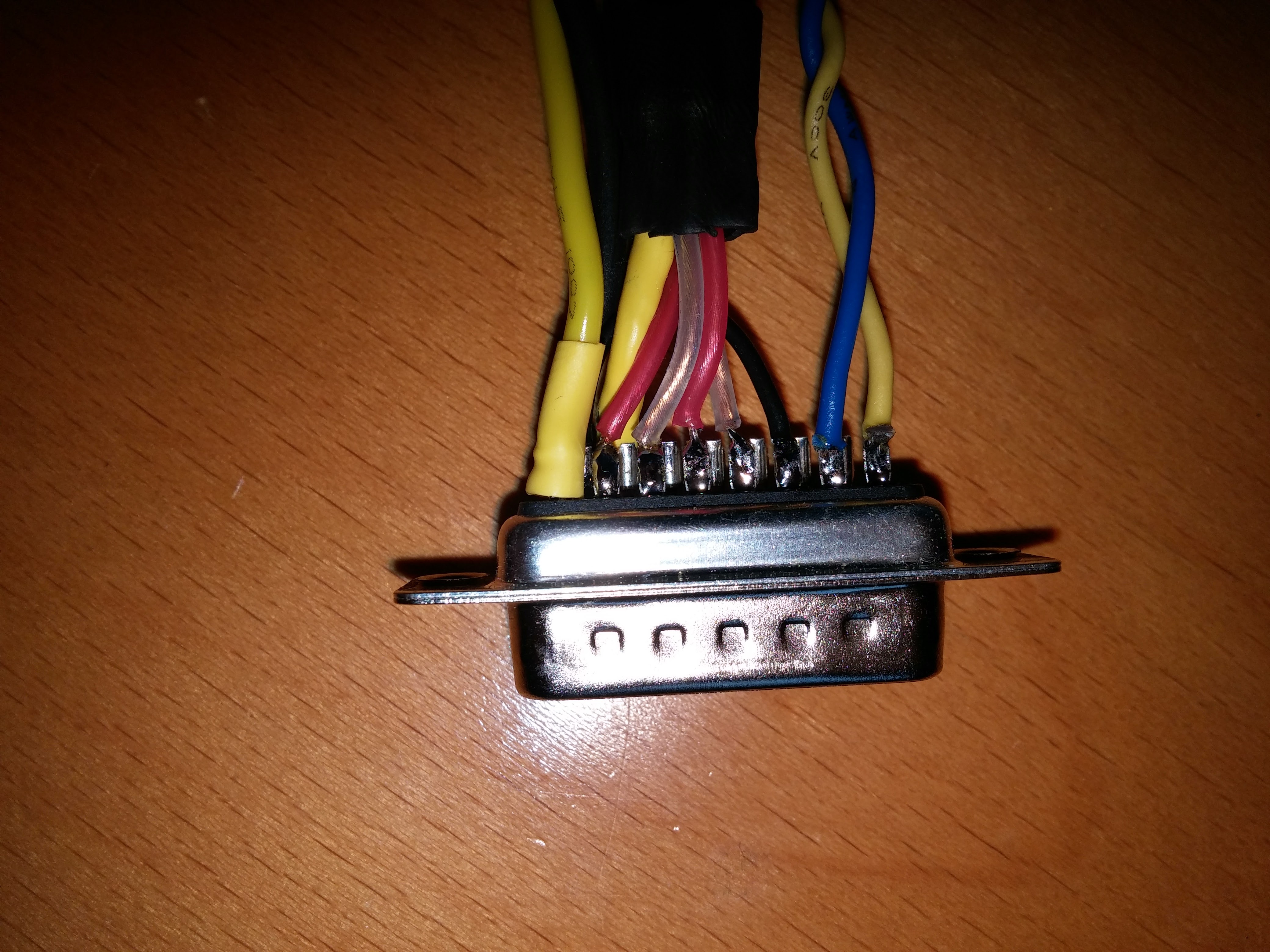
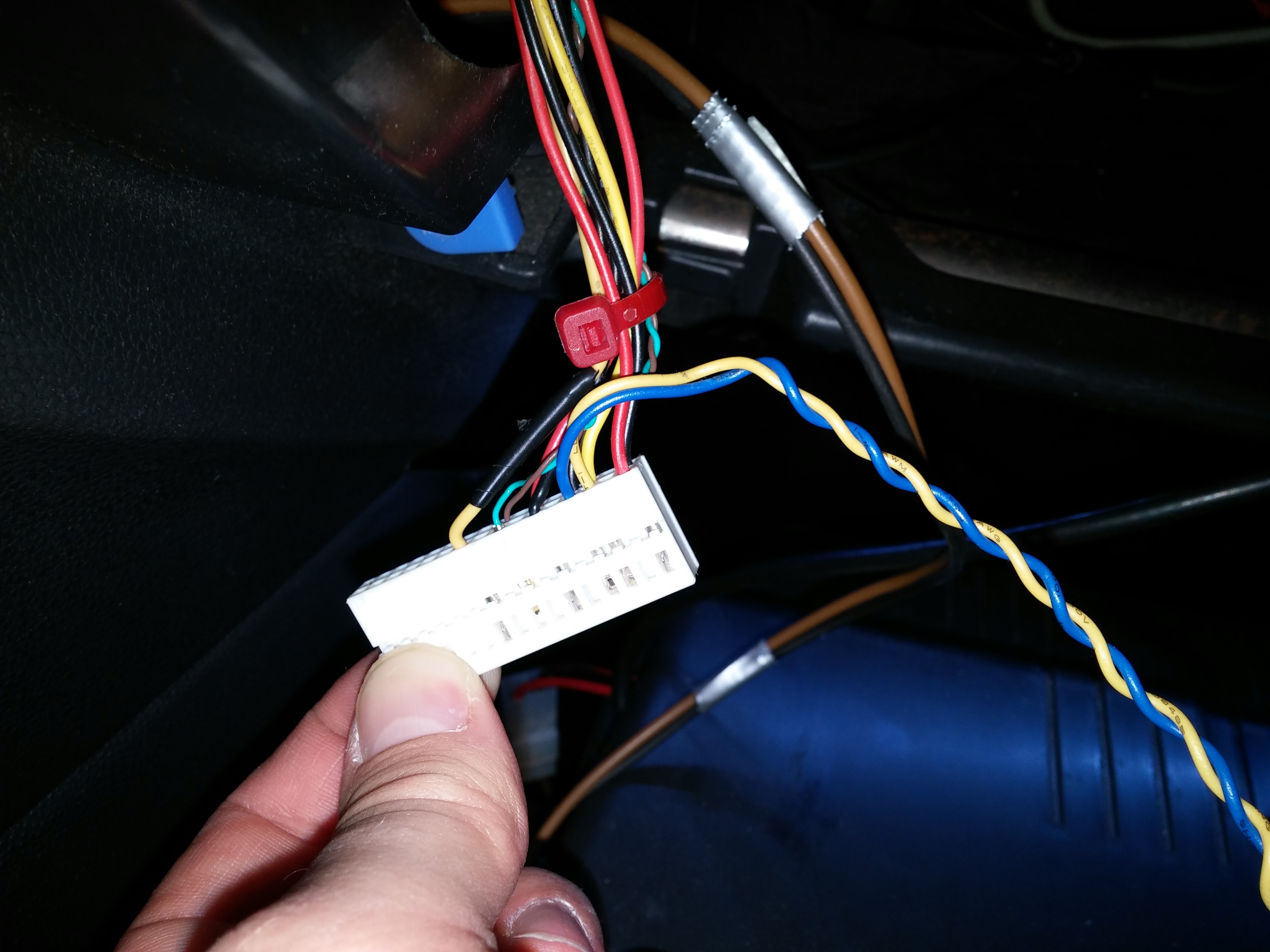
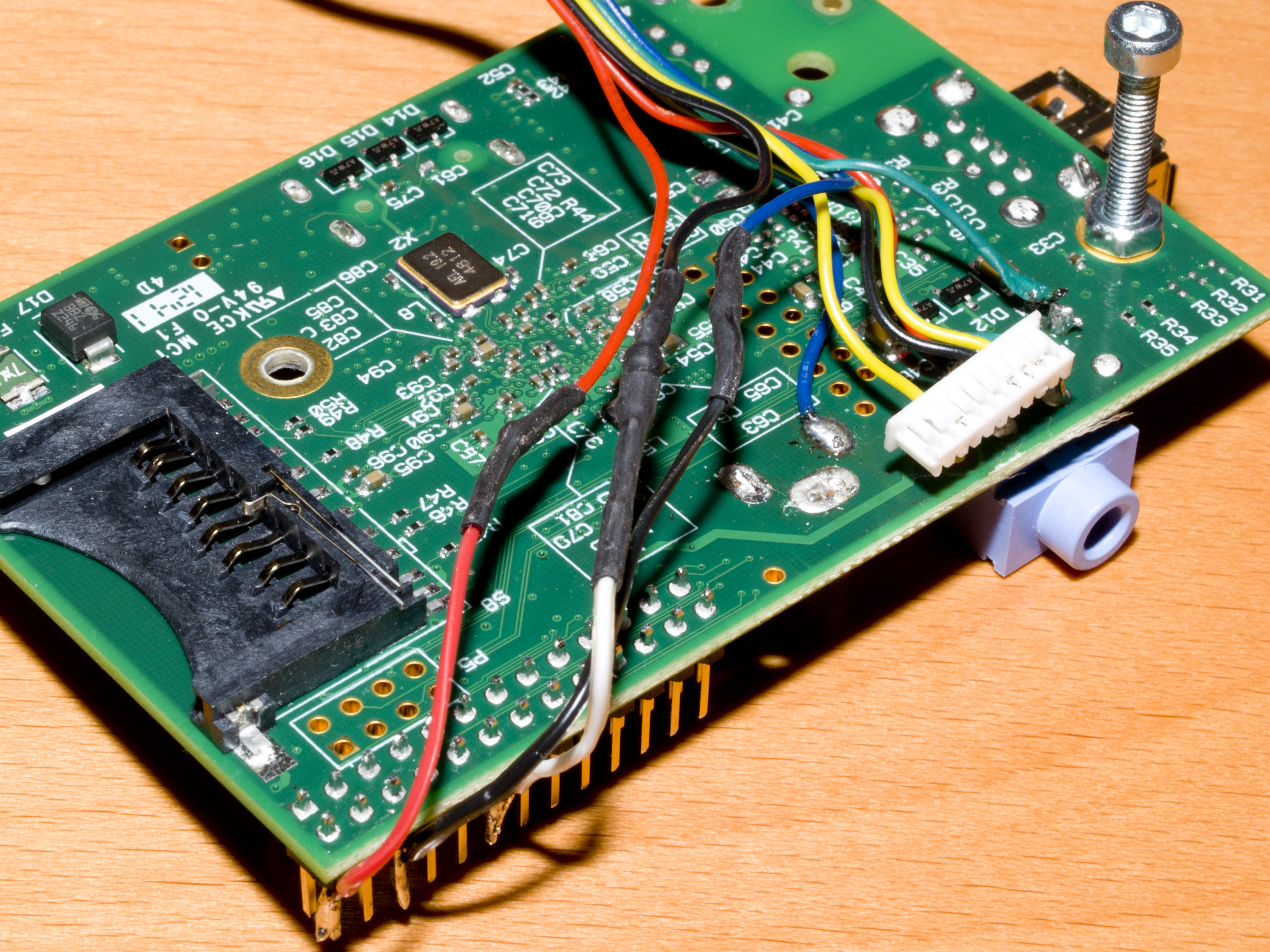
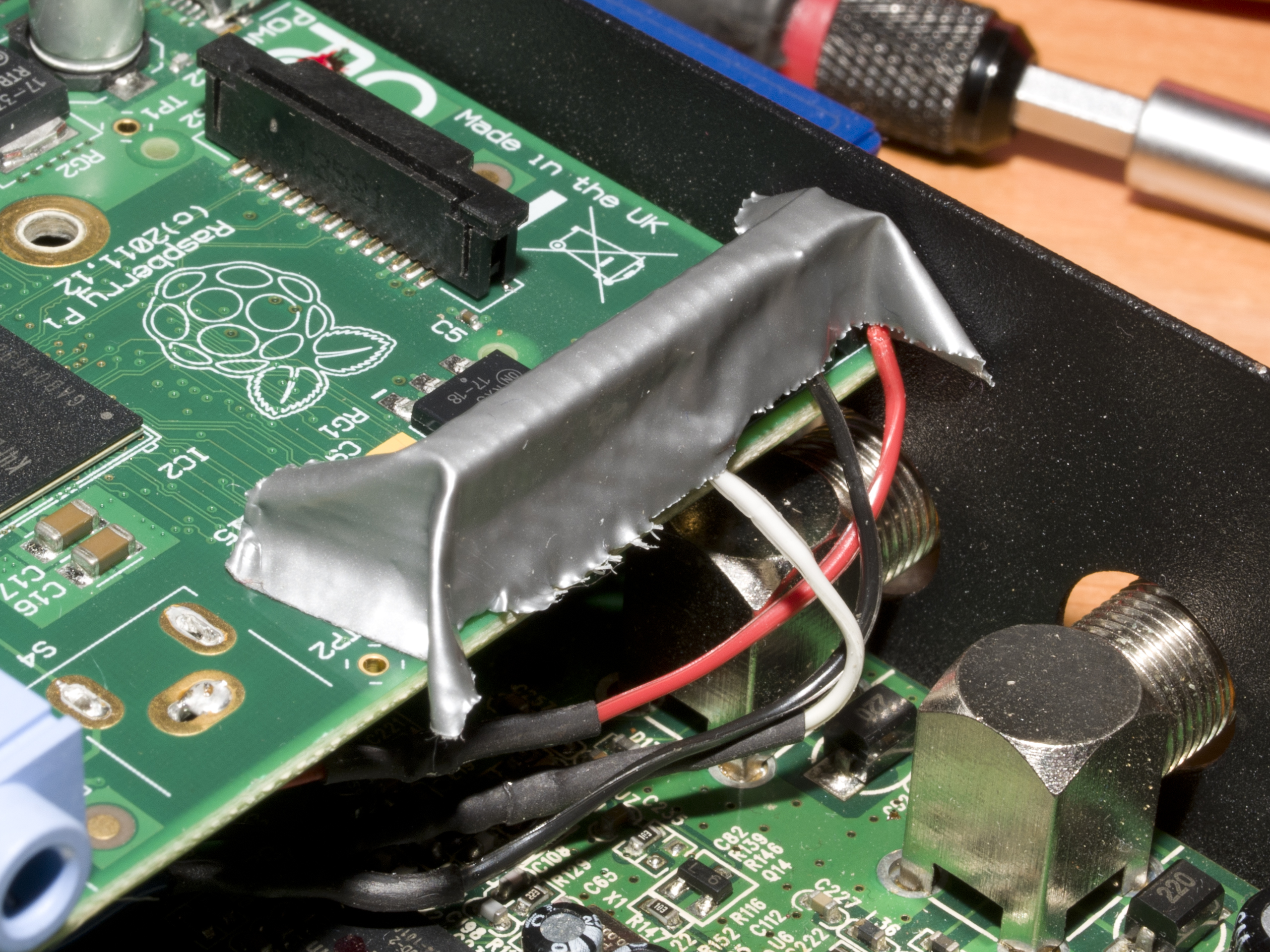
Motivated by this fact i started to figure out the pinout of the connector that connects the media player with the mail PCB:
1 – Blue: CVBS Video signal – looped to the video output on media mode
2 – Green: Y – Luma for S-Video (unused)
3 – Yellow: Ground
4 – Black: C – Chroma for S-Video (unused)
5 – Red: Right Audio signal – looped to audio output on media mode
6 – Blue – Ground
7 – Green: Left Audio signal – looped to audio output on media mode
8 – Yellow: +3,3V on media mode
9 – Black – Infrared Data – looped to I/R input on media mode
10 – Red: +5V on media mode
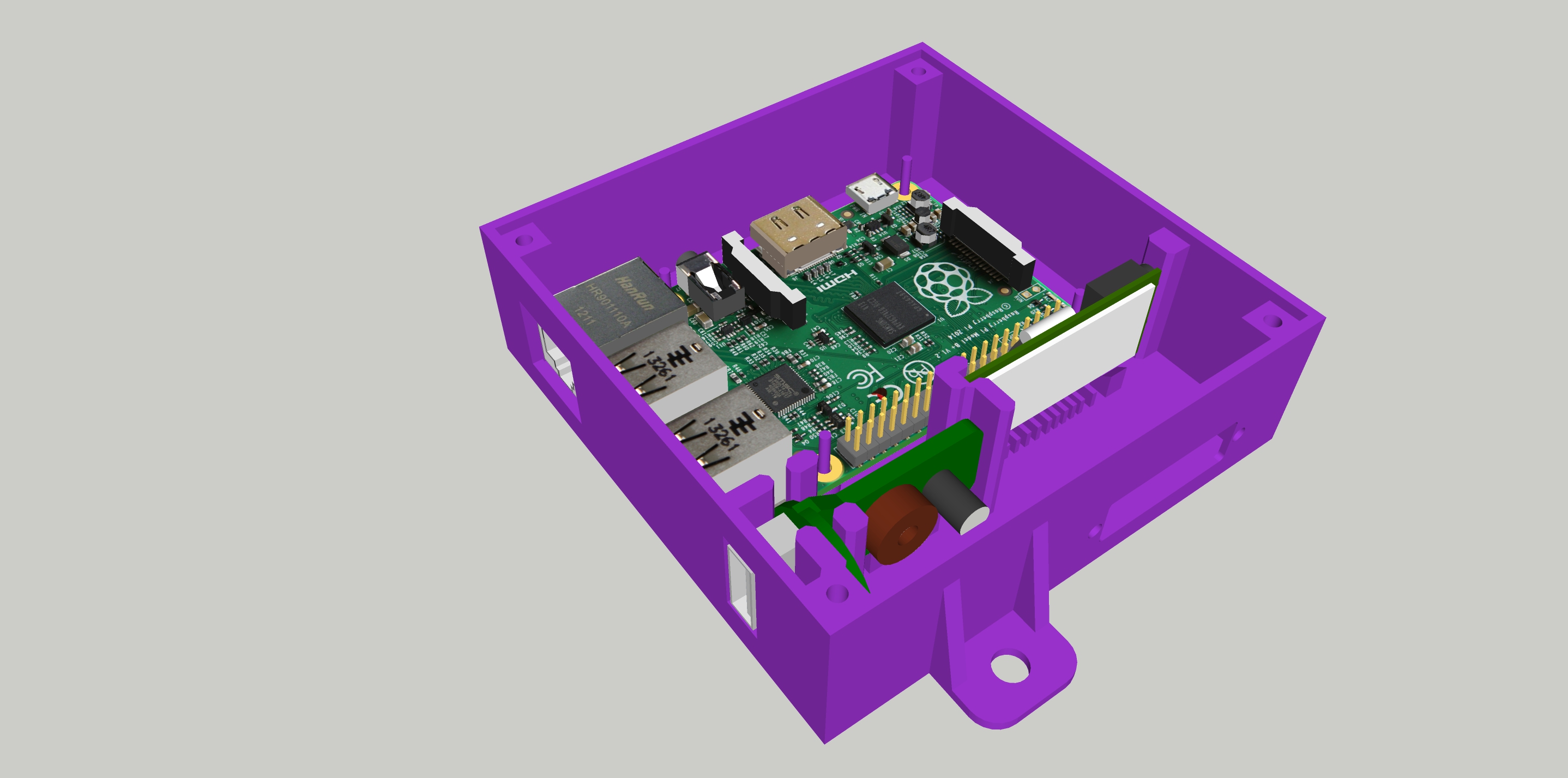
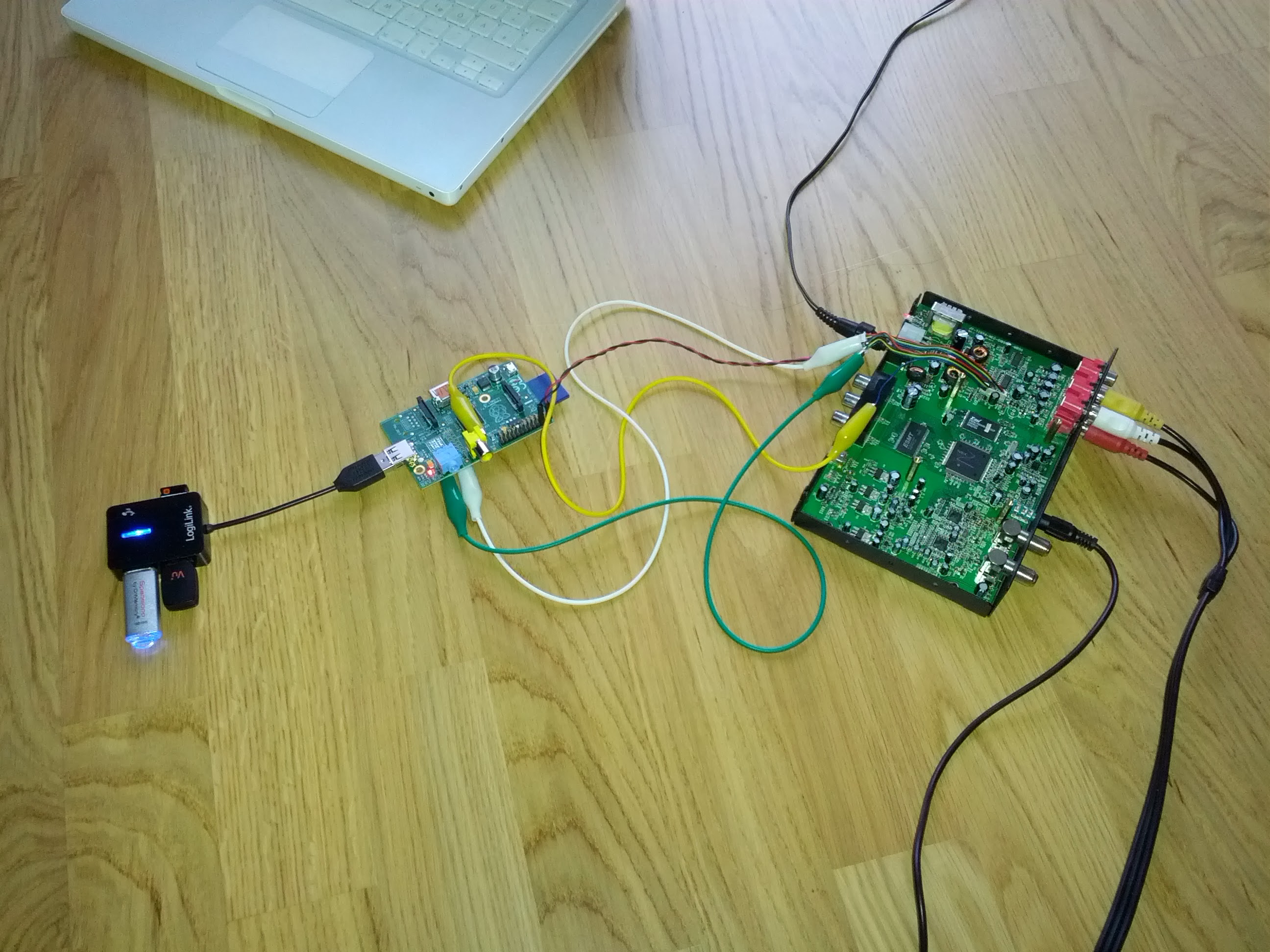
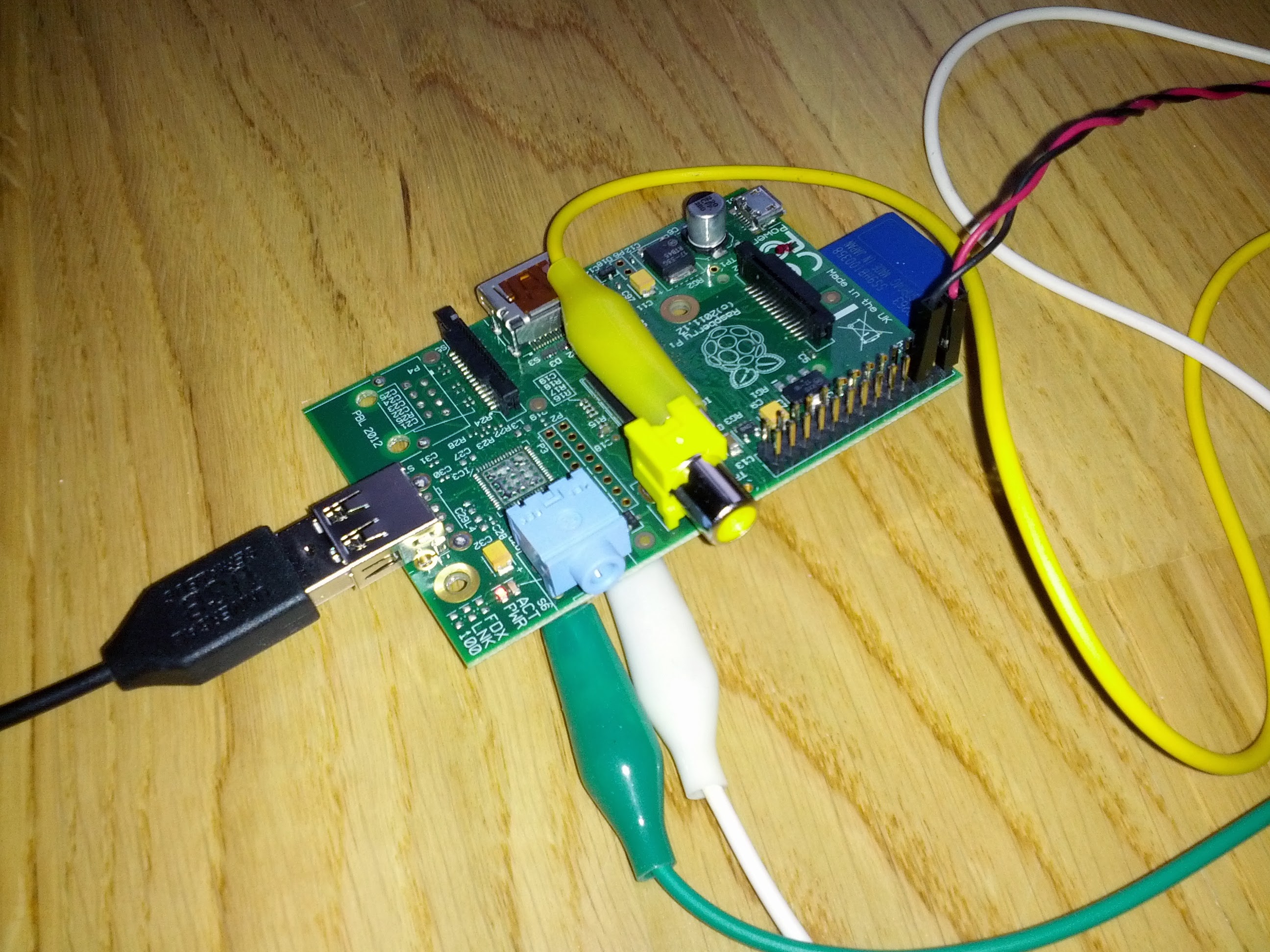
This turns out to be way more hackable than i imagined, time for a first test with a Raspberry Pi:
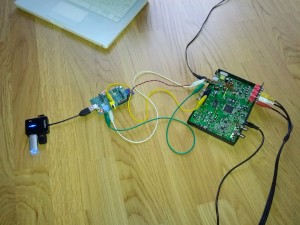

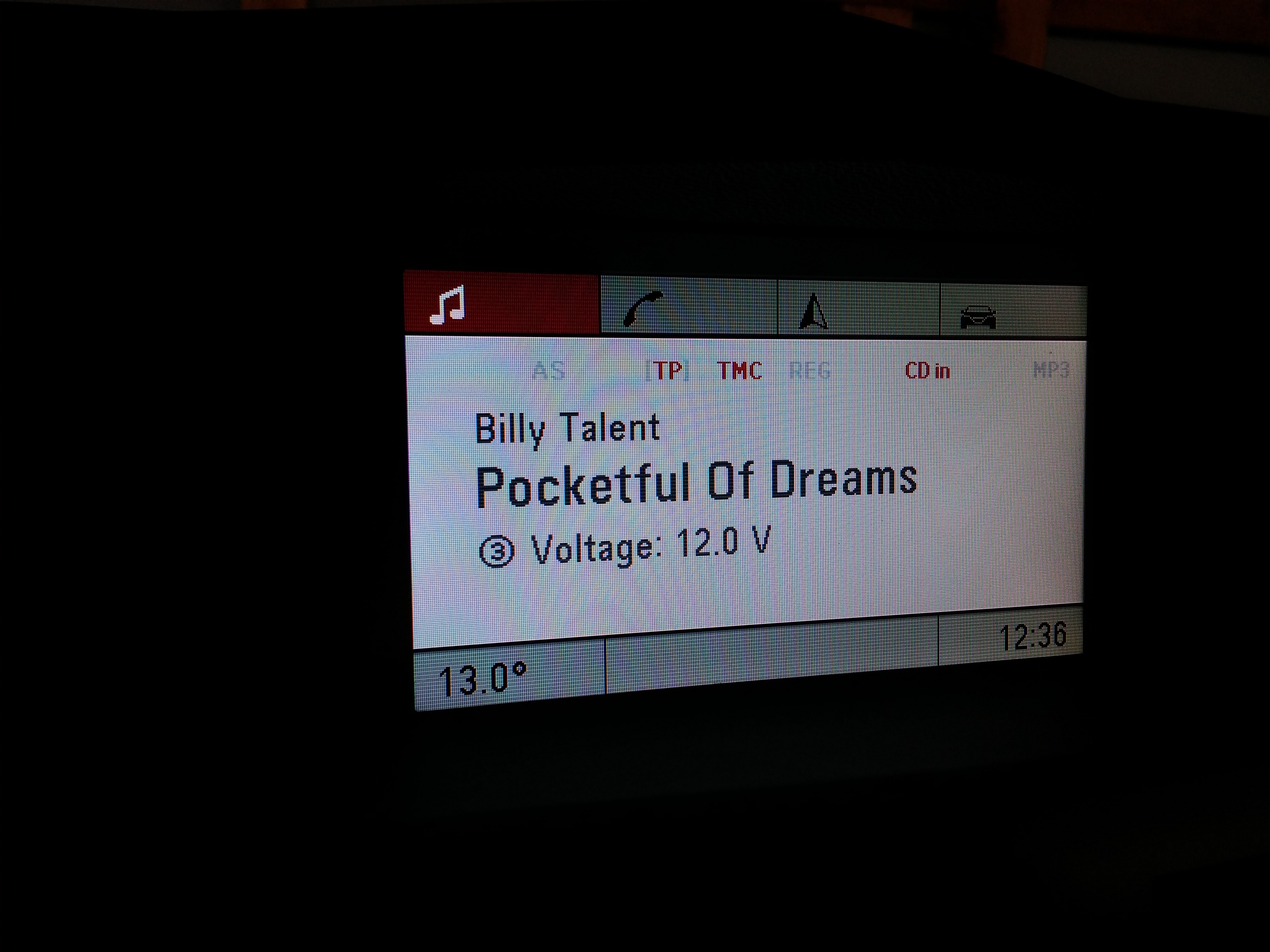
It worked! The internal 5V power source provides enough power to source the raspberry, a USB-hub, 32GB USB-stick, wifi dongle and a logitech wireless receiver!
I can switch to media mode, the raspberry boots up and provides a good image and sound quality (as good as the internal sound device…).
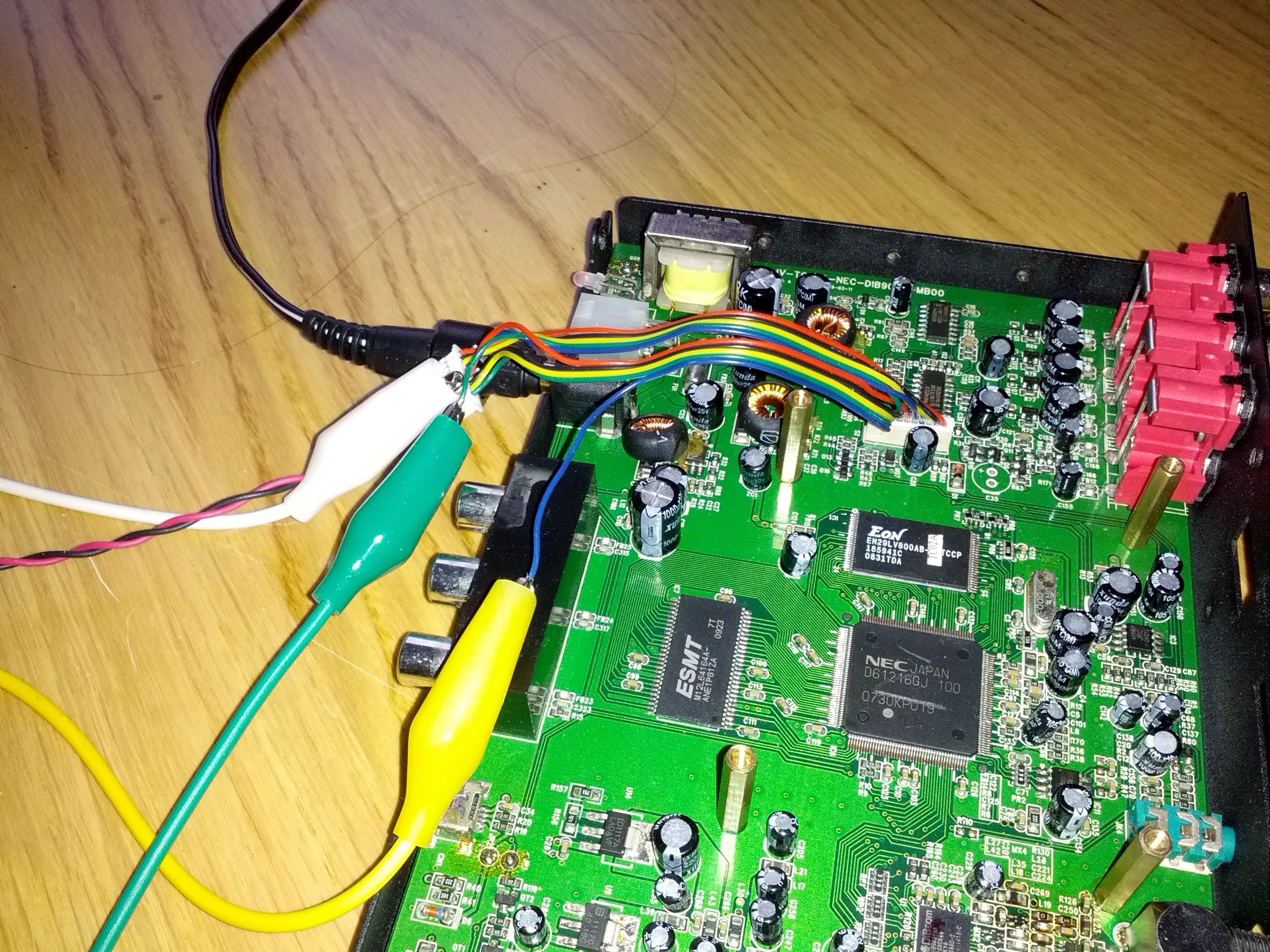
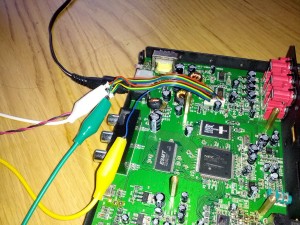
Next test is the remote control with the original infrared remote. The “eye” seams to be a very usual I/R receiver, running on 5V, the data line is directly looped to PIN9 of the connector.
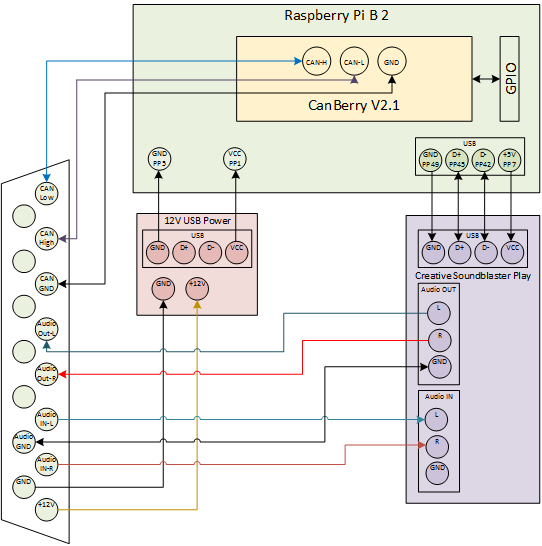
To protect the 3,3V GPIO-Pins of the raspberry, I connected it with a 4,7K resistor to GPIO18 (pin 12) and used the lirc_rpi module an lirc to read it.
At this point I’m really starting to wonder about this project, because even that works perfectly on first try! (I will add another post about the Software, including the lirc configuration!)
No doubt, this concept is proofed!
The Build
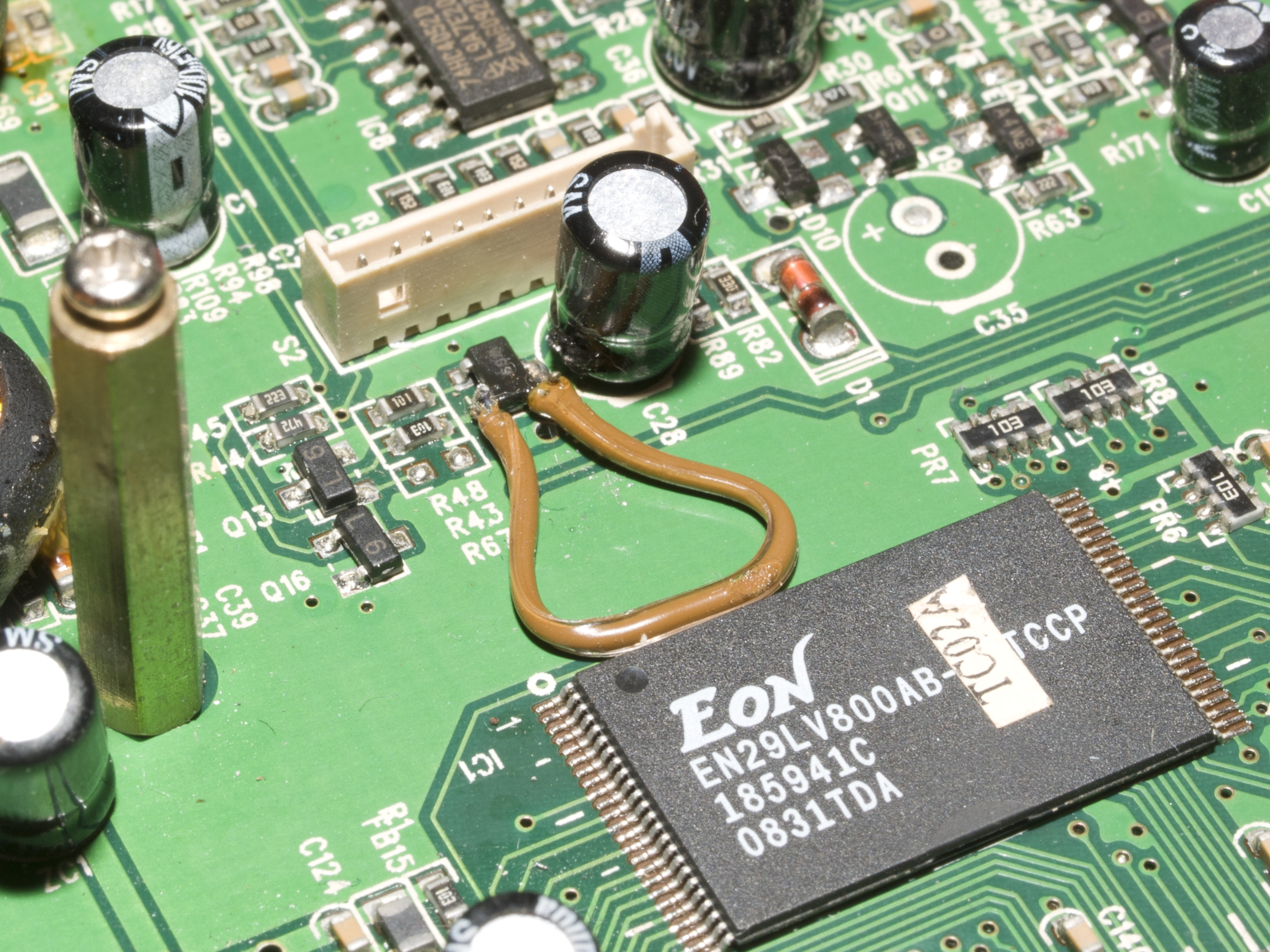
Before I could put all components together, there is one small thing to fix at the main PCB: The power to the raspberry is only provided in media-mode and was cut immediately when switching to TV.
I identified the responsible transistor and just bridged it:

Now the raspberry boots up when the power is connected (what is actually my ignition, later more).
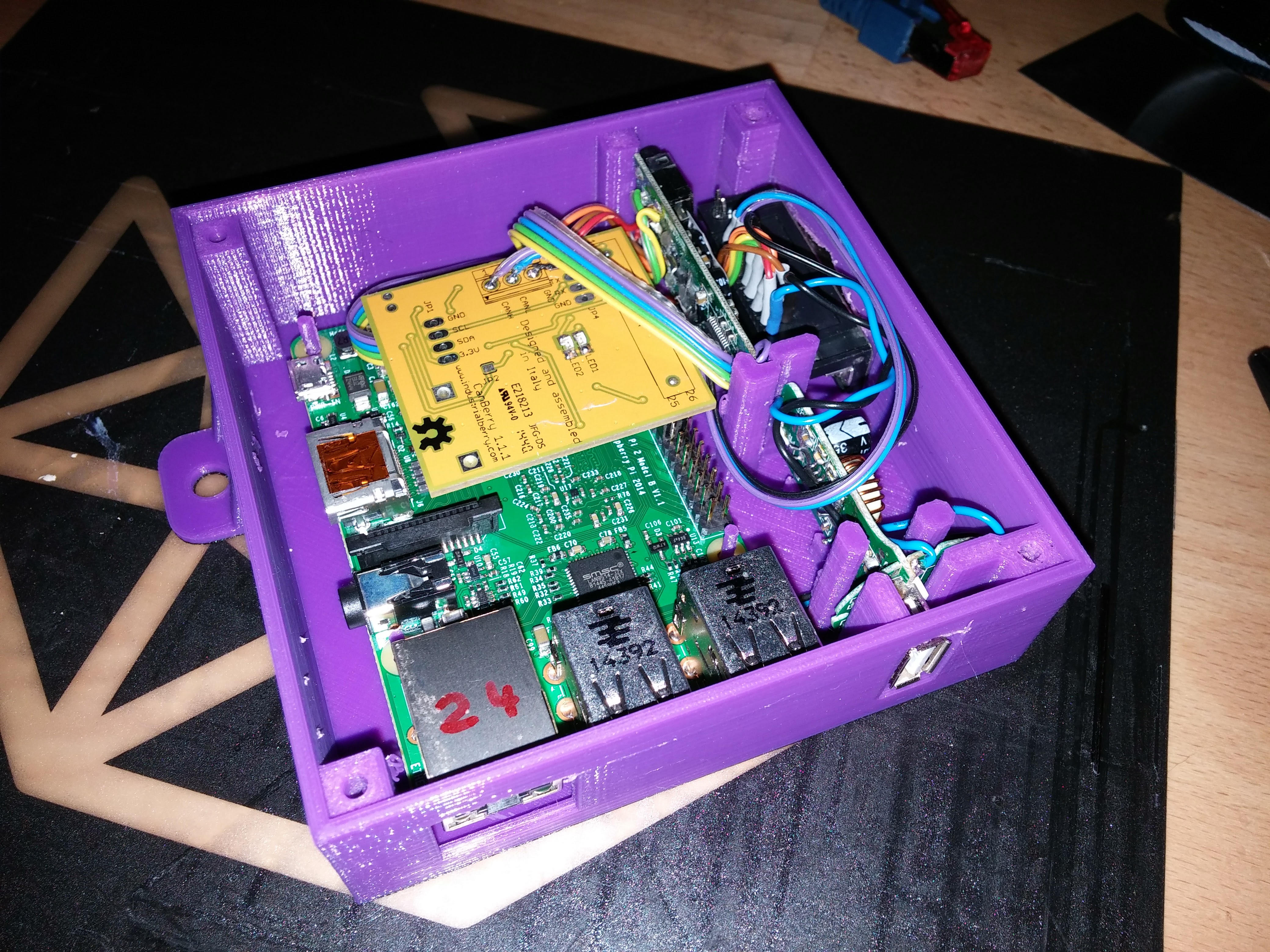
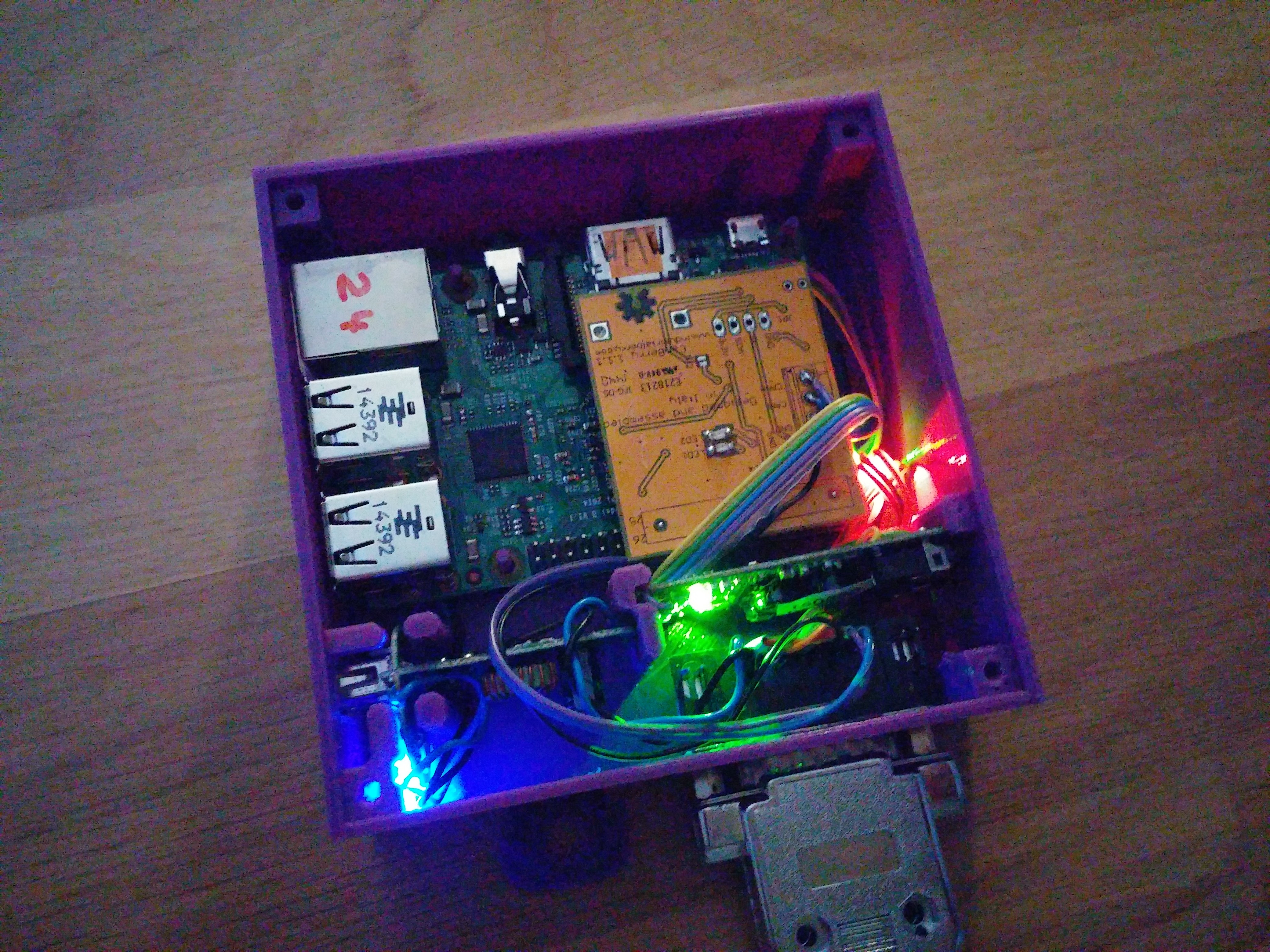
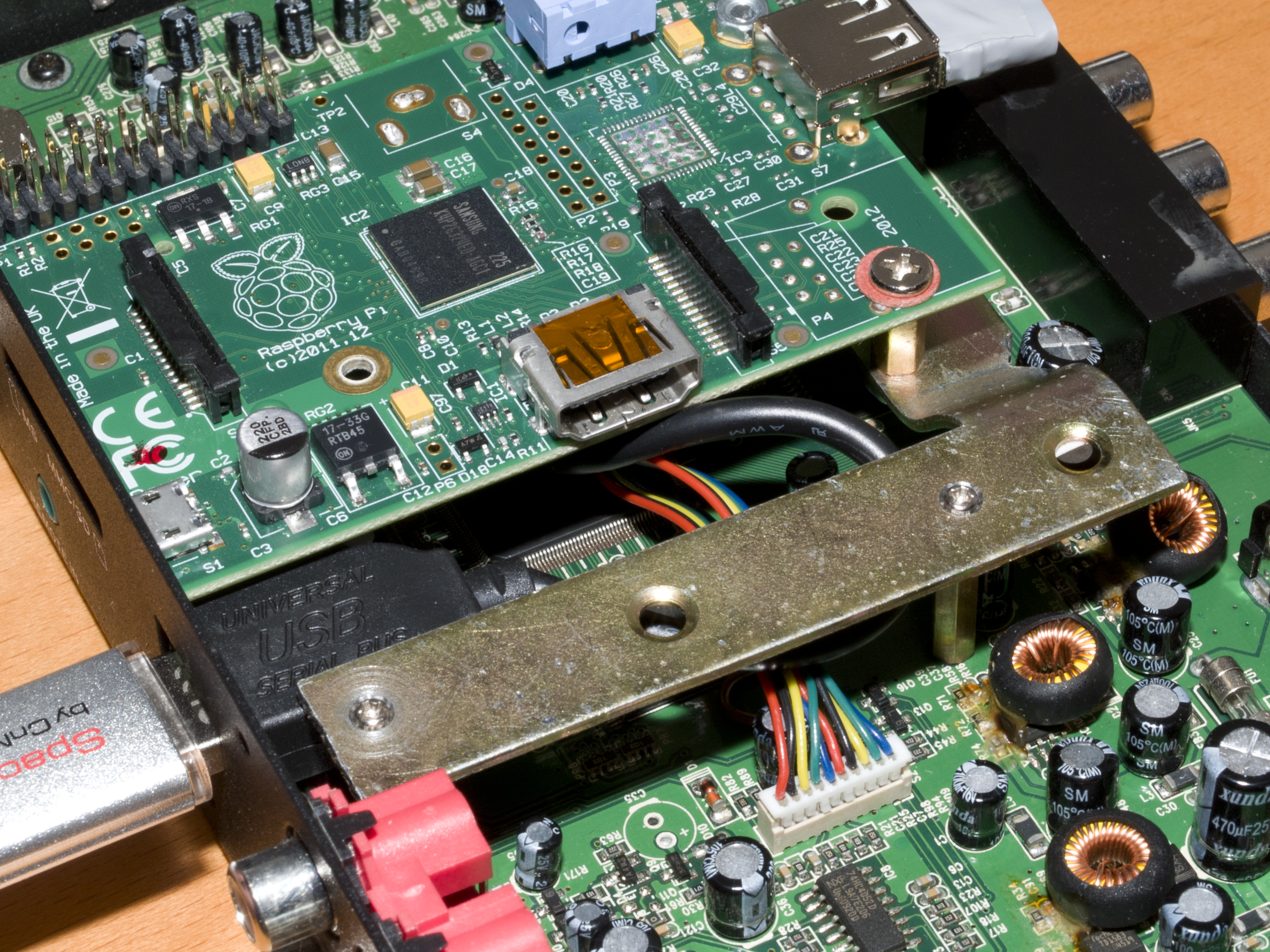
Time for the wiring of the Pi (I needed to remove the CVBS-Connector to fit the Pi inside the housing!):

The USB-Connector was too long for the housing, so I adapted it to fit!
To hold the pi in position, I made an adapter out of a piece of metal from the hardware store:


Some work on the USB-port, isolation for the GPIO-Pins, shrink tube and hot glue:





The cage of the USB-Port is bend around the hole in the housing to hold it in position, I will add a picture of that later… (maybe)
Thats it! The hardware is ready, so far.
Next steps
I will soon post about the software used on the raspberry.
The device is powered with ignition what means that the Pi will boot when the ignition is turned on. To shorten the time that it takes to start playing music, I have planned a little circuit that powers it on after unlocking the car.
Another planned project is to use my old android smartphone as a head up display and Wifi hotspot. Having internet in the car could also bring some more features to the raspberry like dropbox music sync, weather information etc.